|
MBDyn-1.7.3
|
|
MBDyn-1.7.3
|
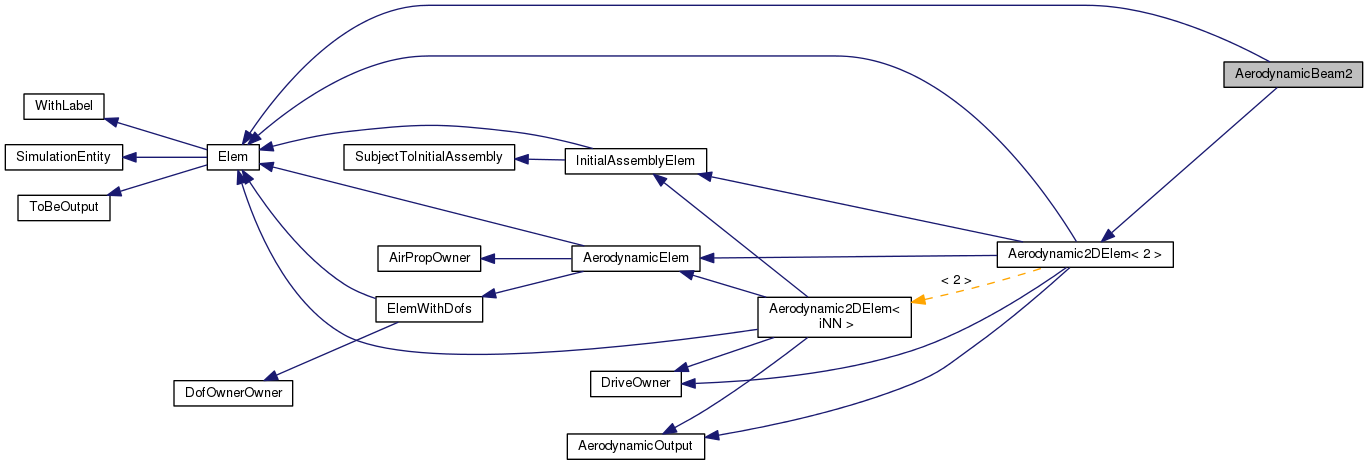
#include <aeroelem.h>

Public Member Functions | |
| AerodynamicBeam2 (unsigned int uLabel, const DofOwner *pDO, const Beam2 *pB, InducedVelocity *pR, bool bPassive, const Vec3 &fTmp1, const Vec3 &fTmp2, const Mat3x3 &Ra1Tmp, const Mat3x3 &Ra2Tmp, const Shape *pC, const Shape *pF, const Shape *pV, const Shape *pT, const Shape *pTL, integer iN, AeroData *a, const DriveCaller *pDC, bool bUseJacobian, OrientationDescription ood, flag fOut) | |
| virtual | ~AerodynamicBeam2 (void) |
| virtual std::ostream & | Restart (std::ostream &out) const |
| virtual VariableSubMatrixHandler & | AssJac (VariableSubMatrixHandler &WorkMat, doublereal, const VectorHandler &, const VectorHandler &) |
| virtual SubVectorHandler & | AssRes (SubVectorHandler &WorkVec, doublereal dCoef, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual SubVectorHandler & | InitialAssRes (SubVectorHandler &WorkVec, const VectorHandler &XCurr) |
| virtual void | Output (OutputHandler &OH) const |
| virtual AerodynamicElem::Type | GetAerodynamicElemType (void) const |
| virtual void | GetConnectedNodes (std::vector< const Node * > &connectedNodes) const |
 Public Member Functions inherited from Elem Public Member Functions inherited from Elem | |
| Elem (unsigned int uL, flag fOut) | |
| virtual | ~Elem (void) |
| virtual void | AssMats (VariableSubMatrixHandler &WorkMatA, VariableSubMatrixHandler &WorkMatB, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual bool | bInverseDynamics (void) const |
| void | SetInverseDynamicsFlags (unsigned uIDF) |
| unsigned | GetInverseDynamicsFlags (void) const |
| bool | bIsErgonomy (void) const |
| bool | bIsRightHandSide (void) const |
| virtual VariableSubMatrixHandler & | AssJac (VariableSubMatrixHandler &WorkMat, const VectorHandler &XCurr) |
| virtual SubVectorHandler & | AssRes (SubVectorHandler &WorkVec, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr, const VectorHandler &XPrimePrimeCurr, InverseDynamics::Order iOrder=InverseDynamics::INVERSE_DYNAMICS) |
| virtual int | GetNumConnectedNodes (void) const |
| Public Member Functions inherited from WithLabel | |
| WithLabel (unsigned int uL=0, const std::string &sN="") | |
| virtual | ~WithLabel (void) |
| void | PutLabel (unsigned int uL) |
| void | PutName (const std::string &sN) |
| unsigned int | GetLabel (void) const |
| const std::string & | GetName (void) const |
| Public Member Functions inherited from SimulationEntity | |
| SimulationEntity (void) | |
| virtual | ~SimulationEntity (void) |
| virtual bool | bIsValidIndex (unsigned int i) const |
| virtual DofOrder::Order | GetEqType (unsigned int i) const |
| virtual Hint * | ParseHint (DataManager *pDM, const char *s) const |
| virtual void | BeforePredict (VectorHandler &, VectorHandler &, VectorHandler &, VectorHandler &) const |
| virtual void | AfterPredict (VectorHandler &X, VectorHandler &XP) |
| virtual void | Update (const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | DerivativesUpdate (const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | Update (const VectorHandler &XCurr, InverseDynamics::Order iOrder) |
| virtual void | AfterConvergence (const VectorHandler &X, const VectorHandler &XP, const VectorHandler &XPP) |
| virtual unsigned int | iGetNumPrivData (void) const |
| virtual unsigned int | iGetPrivDataIdx (const char *s) const |
| virtual doublereal | dGetPrivData (unsigned int i) const |
| virtual std::ostream & | OutputAppend (std::ostream &out) const |
| virtual void | ReadInitialState (MBDynParser &HP) |
| Public Member Functions inherited from ToBeOutput | |
| ToBeOutput (flag fOut=fDefaultOut) | |
| virtual | ~ToBeOutput (void) |
| virtual void | Output (OutputHandler &OH, const VectorHandler &X, const VectorHandler &XP) const |
| virtual flag | fToBeOutput (void) const |
| virtual bool | bToBeOutput (void) const |
| Public Member Functions inherited from Aerodynamic2DElem< 2 > | |
| Aerodynamic2DElem (unsigned int uLabel, const DofOwner *pDO, InducedVelocity *pR, bool bPassive, const Shape *pC, const Shape *pF, const Shape *pV, const Shape *pT, const Shape *pTL, integer iN, AeroData *a, const DriveCaller *pDC, bool bUseJacobian, OrientationDescription ood, flag fOut) | |
| virtual | ~Aerodynamic2DElem (void) |
| virtual Elem::Type | GetElemType (void) const |
| virtual unsigned int | iGetNumDof (void) const |
| virtual std::ostream & | DescribeDof (std::ostream &out, const char *prefix="", bool bInitial=false) const |
| virtual void | DescribeDof (std::vector< std::string > &desc, bool bInitial=false, int i=-1) const |
| virtual std::ostream & | DescribeEq (std::ostream &out, const char *prefix="", bool bInitial=false) const |
| virtual void | DescribeEq (std::vector< std::string > &desc, bool bInitial=false, int i=-1) const |
| virtual DofOrder::Order | GetDofType (unsigned int) const |
| virtual void | OutputPrepare (OutputHandler &OH) |
| virtual void | SetValue (DataManager *pDM, VectorHandler &X, VectorHandler &XP, SimulationEntity::Hints *h=0) |
| virtual void | AfterConvergence (const VectorHandler &X, const VectorHandler &XP) |
| virtual void | WorkSpaceDim (integer *piNumRows, integer *piNumCols) const |
| virtual unsigned int | iGetInitialNumDof (void) const |
| virtual void | InitialWorkSpaceDim (integer *piNumRows, integer *piNumCols) const |
| virtual VariableSubMatrixHandler & | InitialAssJac (VariableSubMatrixHandler &WorkMat, const VectorHandler &) |
| virtual const InducedVelocity * | pGetInducedVelocity (void) const |
| Public Member Functions inherited from AerodynamicElem | |
| AerodynamicElem (unsigned int uL, const DofOwner *pDO, flag fOut) | |
| virtual | ~AerodynamicElem (void) |
| virtual bool | NeedsAirProperties (void) const |
| Public Member Functions inherited from ElemWithDofs | |
| ElemWithDofs (unsigned int uL, const DofOwner *pDO, flag fOut) | |
| virtual | ~ElemWithDofs (void) |
| Public Member Functions inherited from DofOwnerOwner | |
| DofOwnerOwner (const DofOwner *pDO) | |
| virtual | ~DofOwnerOwner () |
| virtual const DofOwner * | pGetDofOwner (void) const |
| virtual integer | iGetFirstIndex (void) const |
| virtual void | SetInitialValue (VectorHandler &X) |
| Public Member Functions inherited from AirPropOwner | |
| AirPropOwner (void) | |
| virtual | ~AirPropOwner (void) |
| virtual void | PutAirProperties (const AirProperties *pAP) |
| virtual flag | fGetAirVelocity (Vec3 &Velocity, const Vec3 &X) const |
| virtual doublereal | dGetAirDensity (const Vec3 &X) const |
| virtual doublereal | dGetAirPressure (const Vec3 &X) const |
| virtual doublereal | dGetAirTemperature (const Vec3 &X) const |
| virtual doublereal | dGetSoundSpeed (const Vec3 &X) const |
| virtual bool | GetAirProps (const Vec3 &X, doublereal &rho, doublereal &c, doublereal &p, doublereal &T) const |
| Public Member Functions inherited from InitialAssemblyElem | |
| InitialAssemblyElem (unsigned int uL, flag fOut) | |
| virtual | ~InitialAssemblyElem (void) |
| Public Member Functions inherited from SubjectToInitialAssembly | |
| SubjectToInitialAssembly (void) | |
| virtual | ~SubjectToInitialAssembly (void) |
| Public Member Functions inherited from DriveOwner | |
| DriveOwner (const DriveCaller *pDC=0) | |
| DriveOwner (const DriveOwner &drive) | |
| virtual | ~DriveOwner (void) |
| void | Set (const DriveCaller *pDC) |
| DriveCaller * | pGetDriveCaller (void) const |
| doublereal | dGet (const doublereal &dVar) const |
| doublereal | dGet (void) const |
| bool | bIsDifferentiable (void) const |
| doublereal | dGetP (const doublereal &dVar) const |
| doublereal | dGetP (void) const |
| Public Member Functions inherited from AerodynamicOutput | |
| AerodynamicOutput (flag f, int iNP, OrientationDescription ood) | |
| ~AerodynamicOutput (void) | |
| void | SetOutputFlag (flag f, int iNP) |
| void | ResetIterator (void) |
| void | SetData (const Vec3 &v, const doublereal *pd, const Vec3 &X, const Mat3x3 &R, const Vec3 &V, const Vec3 &W, const Vec3 &F, const Vec3 &M) |
| AerodynamicOutput::eOutput | GetOutput (void) const |
| bool | IsOutput (void) const |
| bool | IsSTD (void) const |
| bool | IsPGAUSS (void) const |
| bool | IsNODE (void) const |
Protected Types | |
| enum | { NODE1 = 0, NODE2, LASTNODE } |
| enum | { DELTAx1 = 0, DELTAg1, DELTAx2, DELTAg2 } |
Protected Member Functions | |
| void | AssVec (SubVectorHandler &WorkVec, doublereal dCoef, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| Protected Member Functions inherited from Aerodynamic2DElem< 2 > | |
| virtual void | SetOutputFlag (flag f=flag(1)) |
| void | Output_int (OutputHandler &OH) const |
| void | AddForce_int (const StructNode *pN, const Vec3 &F, const Vec3 &M, const Vec3 &X) const |
| void | AddSectionalForce_int (unsigned uPnt, const Vec3 &F, const Vec3 &M, doublereal dW, const Vec3 &X, const Mat3x3 &R, const Vec3 &V, const Vec3 &W) const |
Additional Inherited Members | |
| Public Types inherited from Elem | |
| enum | Type { UNKNOWN = -1, AIRPROPERTIES = 0, INDUCEDVELOCITY, AUTOMATICSTRUCTURAL, GRAVITY, BODY, JOINT, JOINT_REGULARIZATION, BEAM, PLATE, FORCE, INERTIA, ELECTRICBULK, ELECTRIC, THERMAL, HYDRAULIC, BULK, LOADABLE, DRIVEN, EXTERNAL, AEROMODAL, AERODYNAMIC, GENEL, SOCKETSTREAM_OUTPUT, RTAI_OUTPUT = SOCKETSTREAM_OUTPUT, LASTELEMTYPE } |
| Public Types inherited from SimulationEntity | |
| typedef std::vector< Hint * > | Hints |
| Public Types inherited from ToBeOutput | |
| enum | { OUTPUT = 0x1U, OUTPUT_MASK = 0xFU, OUTPUT_PRIVATE = 0x10U, OUTPUT_PRIVATE_MASK = ~OUTPUT_MASK } |
| Public Types inherited from AerodynamicElem | |
| enum | Type { UNKNOWN = -1, INDUCEDVELOCITY = 0, AEROMODAL, AERODYNAMICBODY, AERODYNAMICBEAM, AERODYNAMICEXTERNAL, AERODYNAMICEXTERNALMODAL, AERODYNAMICLOADABLE, AIRCRAFTINSTRUMENTS, GENERICFORCE, LASTAEROTYPE } |
| Public Types inherited from AerodynamicOutput | |
| enum | eOutput { AEROD_OUT_NONE = 0x0U, AEROD_OUT_STD = (ToBeOutput::OUTPUT_PRIVATE << 0), AEROD_OUT_PGAUSS = (ToBeOutput::OUTPUT_PRIVATE << 1), AEROD_OUT_NODE = (ToBeOutput::OUTPUT_PRIVATE << 2), AEROD_OUT_MASK = (AEROD_OUT_STD | AEROD_OUT_PGAUSS | AEROD_OUT_NODE) } |
| enum | { OUTPUT_NONE = 0x0U, OUTPUT_GP_X = (ToBeOutput::OUTPUT_PRIVATE << 4), OUTPUT_GP_R = (ToBeOutput::OUTPUT_PRIVATE << 5), OUTPUT_GP_V = (ToBeOutput::OUTPUT_PRIVATE << 6), OUTPUT_GP_W = (ToBeOutput::OUTPUT_PRIVATE << 7), OUTPUT_GP_CONFIGURATION = (OUTPUT_GP_X | OUTPUT_GP_R | OUTPUT_GP_V | OUTPUT_GP_W), OUTPUT_GP_F = (ToBeOutput::OUTPUT_PRIVATE << 8), OUTPUT_GP_M = (ToBeOutput::OUTPUT_PRIVATE << 9), OUTPUT_GP_FORCES = (OUTPUT_GP_F | OUTPUT_GP_M), OUTPUT_DEFAULT = (OUTPUT_GP_F | OUTPUT_GP_M), OUTPUT_GP_ALL = (ToBeOutput::OUTPUT_PRIVATE_MASK & (~AEROD_OUT_MASK)) } |
Definition at line 447 of file aeroelem.h.
|
protected |
| Enumerator | |
|---|---|
| NODE1 | |
| NODE2 | |
| LASTNODE | |
Definition at line 452 of file aeroelem.h.
|
protected |
| Enumerator | |
|---|---|
| DELTAx1 | |
| DELTAg1 | |
| DELTAx2 | |
| DELTAg2 | |
Definition at line 453 of file aeroelem.h.
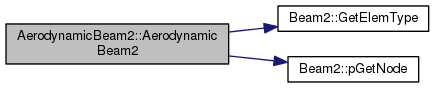
| AerodynamicBeam2::AerodynamicBeam2 | ( | unsigned int | uLabel, |
| const DofOwner * | pDO, | ||
| const Beam2 * | pB, | ||
| InducedVelocity * | pR, | ||
| bool | bPassive, | ||
| const Vec3 & | fTmp1, | ||
| const Vec3 & | fTmp2, | ||
| const Mat3x3 & | Ra1Tmp, | ||
| const Mat3x3 & | Ra2Tmp, | ||
| const Shape * | pC, | ||
| const Shape * | pF, | ||
| const Shape * | pV, | ||
| const Shape * | pT, | ||
| const Shape * | pTL, | ||
| integer | iN, | ||
| AeroData * | a, | ||
| const DriveCaller * | pDC, | ||
| bool | bUseJacobian, | ||
| OrientationDescription | ood, | ||
| flag | fOut | ||
| ) |
Definition at line 2445 of file aeroelem.cc.
References ASSERT, Elem::BEAM, DEBUGCOUTFNAME, Beam2::GetElemType(), NODE1, NODE2, pBeam, Beam2::pGetNode(), pNode, and Node::STRUCTURAL.
|
virtual |
|
virtual |
Implements Elem.
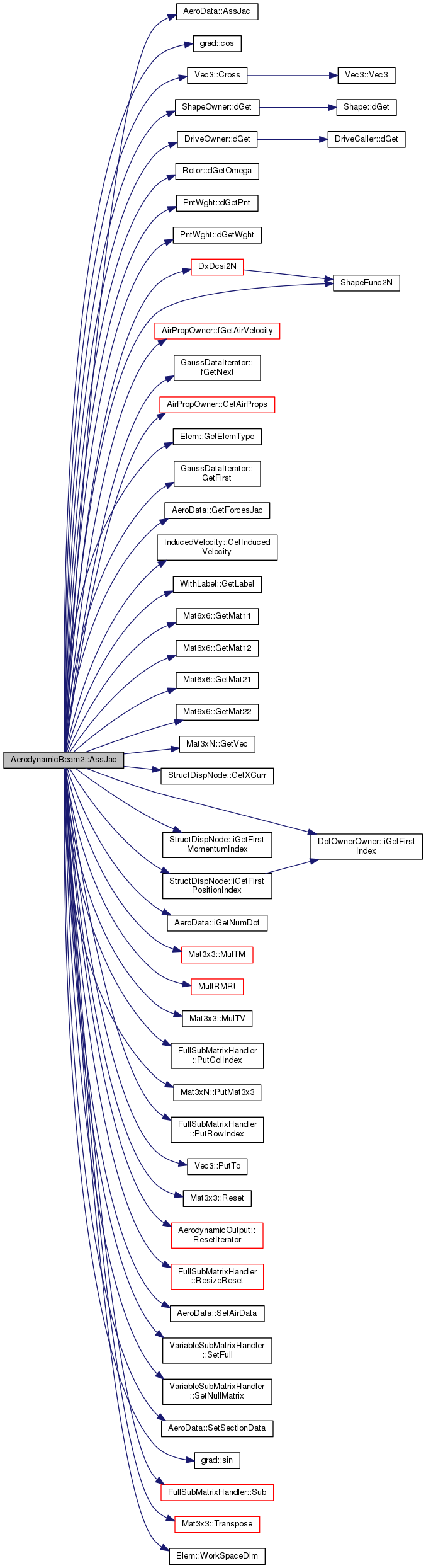
Definition at line 2528 of file aeroelem.cc.
References Aerodynamic2DElem< 2 >::aerodata, AeroData::AssJac(), Aerodynamic2DElem< 2 >::bJacobian, c, Aerodynamic2DElem< 2 >::Chord, grad::cos(), Aerodynamic2DElem< 2 >::cq, Vec3::Cross(), DEBUGCOUT, DELTAg1, DELTAg2, DELTAx1, DELTAx2, ShapeOwner::dGet(), DriveOwner::dGet(), Rotor::dGetOmega(), PntWght::dGetPnt(), PntWght::dGetWght(), dN2, DxDcsi2N(), f1, f2, AirPropOwner::fGetAirVelocity(), GaussDataIterator::fGetNext(), Aerodynamic2DElem< 2 >::ForcePoint, Aerodynamic2DElem< 2 >::fq, Aerodynamic2DElem< 2 >::GDI, AirPropOwner::GetAirProps(), Elem::GetElemType(), GaussDataIterator::GetFirst(), AeroData::GetForcesJac(), InducedVelocity::GetInducedVelocity(), WithLabel::GetLabel(), Mat6x6::GetMat11(), Mat6x6::GetMat12(), Mat6x6::GetMat21(), Mat6x6::GetMat22(), Mat3xN::GetVec(), StructDispNode::GetXCurr(), DofOwnerOwner::iGetFirstIndex(), StructDispNode::iGetFirstMomentumIndex(), StructDispNode::iGetFirstPositionIndex(), AeroData::iGetNumDof(), LASTNODE, MatCross, MatCrossCross, ER_Rot::MatR, Mat3x3::MulTM(), MultRMRt(), Mat3x3::MulTV(), NODE1, NODE2, Aerodynamic2DElem< 2 >::OUTA, ER_Rot::Param, pdsf2, pdsi2, Aerodynamic2DElem< 2 >::pIndVel, pNode, FullSubMatrixHandler::PutColIndex(), Mat3xN::PutMat3x3(), FullSubMatrixHandler::PutRowIndex(), Vec3::PutTo(), Ra1, Ra2, Mat3x3::Reset(), AerodynamicOutput::ResetIterator(), FullSubMatrixHandler::ResizeReset(), AeroData::SetAirData(), VariableSubMatrixHandler::SetFull(), VariableSubMatrixHandler::SetNullMatrix(), AeroData::SetSectionData(), ShapeFunc2N(), grad::sin(), FullSubMatrixHandler::Sub(), Mat3x3::Transpose(), Aerodynamic2DElem< 2 >::Twist, Aerodynamic2DElem< 2 >::VelocityPoint, Aerodynamic2DElem< 2 >::vx, Elem::WorkSpaceDim(), Aerodynamic2DElem< 2 >::wx, and Zero3.
|
virtual |
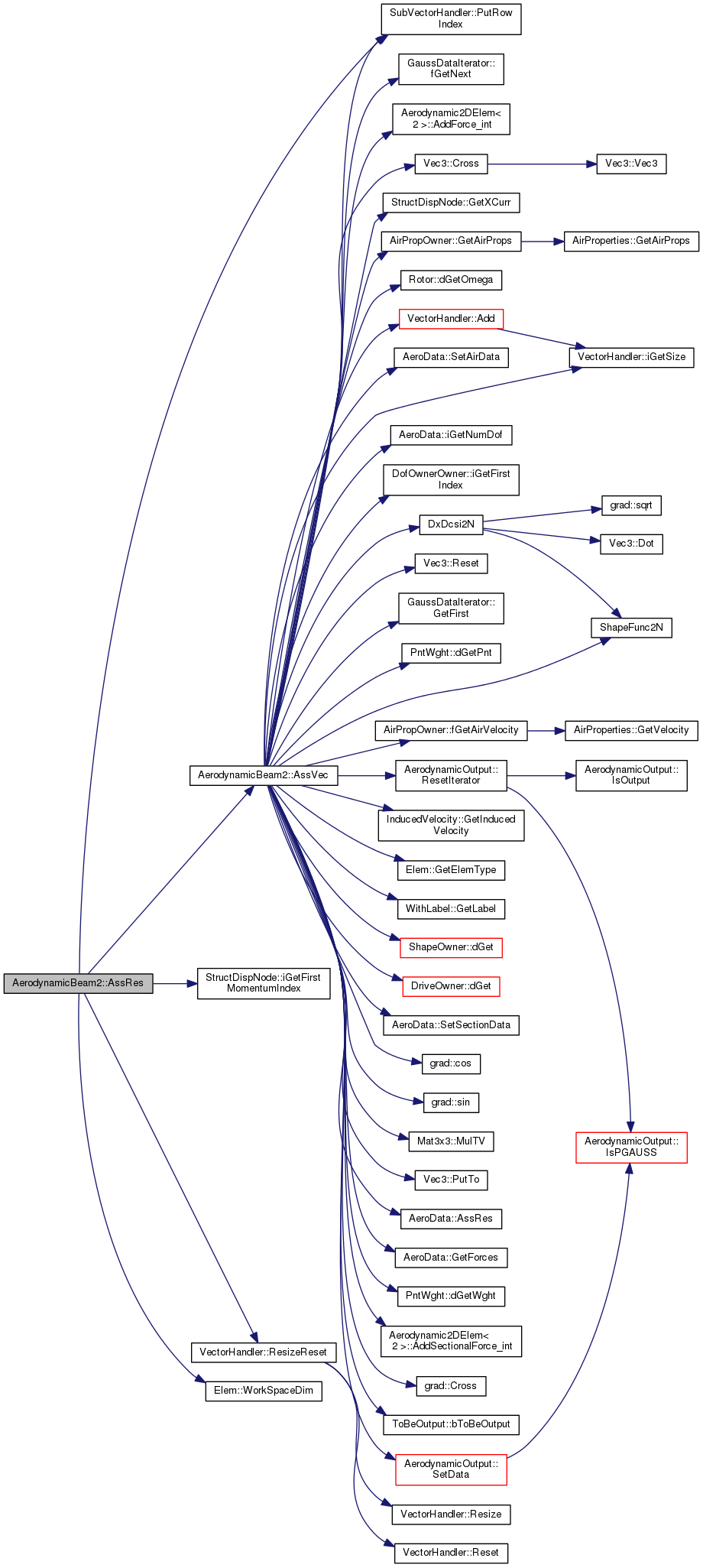
Implements Elem.
Definition at line 2847 of file aeroelem.cc.
References AssVec(), DEBUGCOUTFNAME, StructDispNode::iGetFirstMomentumIndex(), NODE1, NODE2, pNode, SubVectorHandler::PutRowIndex(), VectorHandler::ResizeReset(), and Elem::WorkSpaceDim().
|
protected |
Definition at line 2894 of file aeroelem.cc.
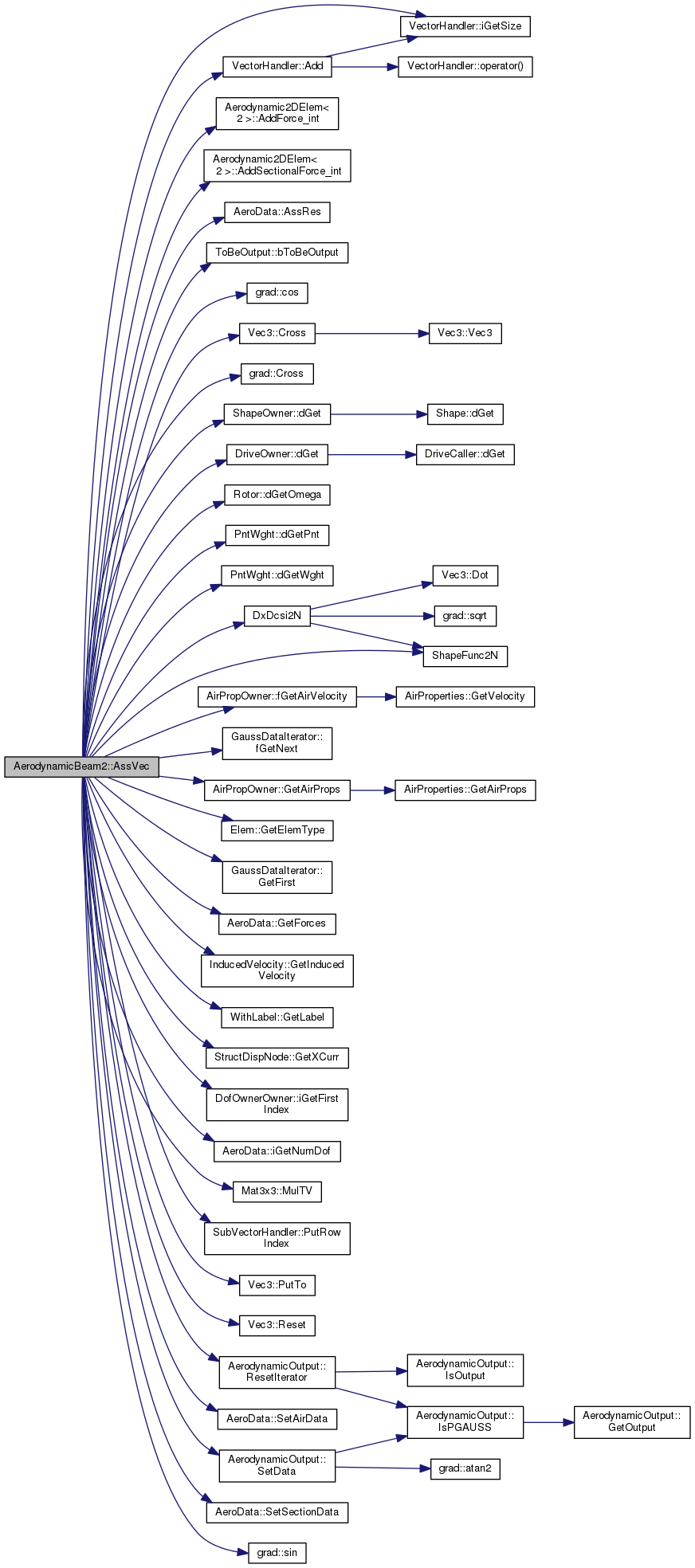
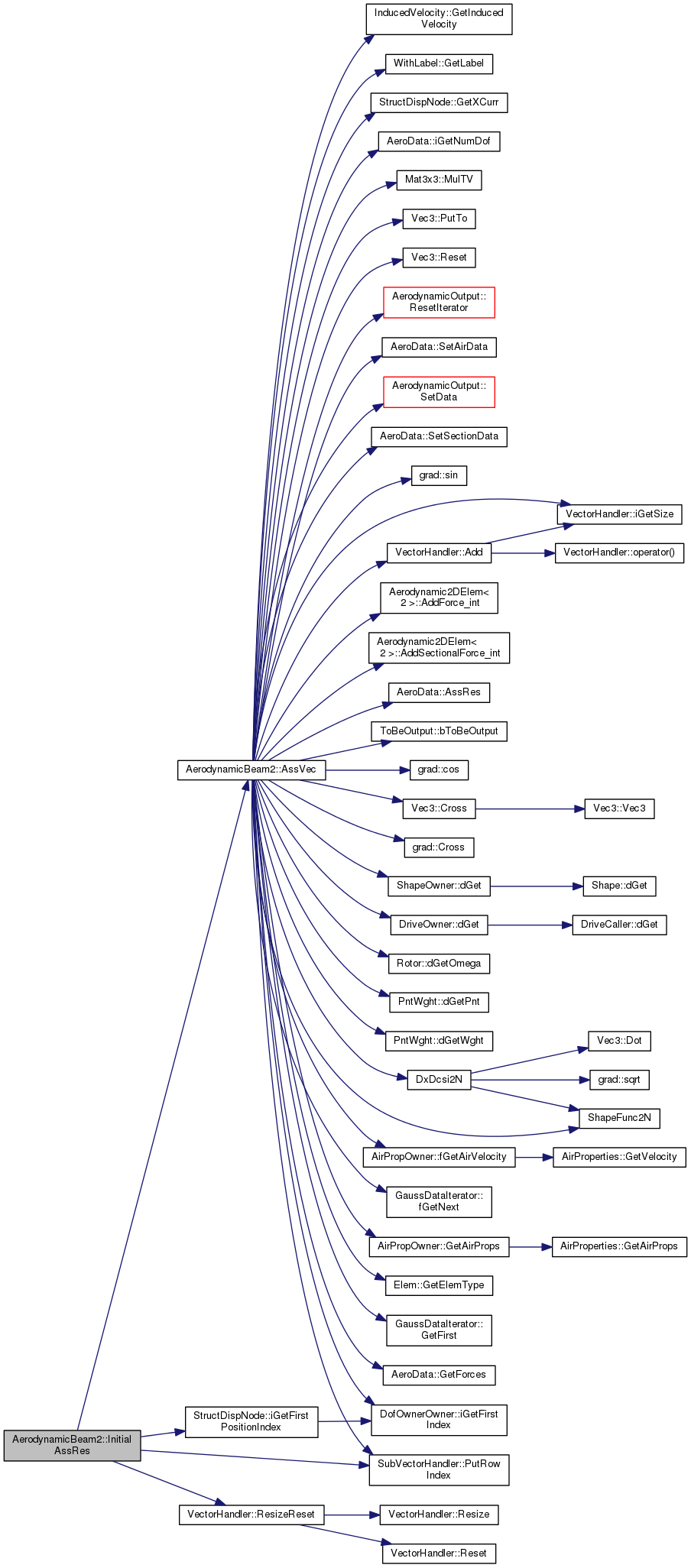
References VectorHandler::Add(), Aerodynamic2DElem< 2 >::AddForce_int(), Aerodynamic2DElem< 2 >::AddSectionalForce_int(), Aerodynamic2DElem< 2 >::aerodata, AeroData::AssRes(), ToBeOutput::bToBeOutput(), c, Aerodynamic2DElem< 2 >::Chord, grad::cos(), Vec3::Cross(), grad::Cross(), DEBUGCOUTFNAME, ShapeOwner::dGet(), DriveOwner::dGet(), Rotor::dGetOmega(), PntWght::dGetPnt(), PntWght::dGetWght(), dN2, DxDcsi2N(), F, f1, f2, AirPropOwner::fGetAirVelocity(), GaussDataIterator::fGetNext(), Aerodynamic2DElem< 2 >::ForcePoint, Aerodynamic2DElem< 2 >::GDI, AirPropOwner::GetAirProps(), Elem::GetElemType(), GaussDataIterator::GetFirst(), AeroData::GetForces(), InducedVelocity::GetInducedVelocity(), WithLabel::GetLabel(), StructDispNode::GetXCurr(), DofOwnerOwner::iGetFirstIndex(), AeroData::iGetNumDof(), VectorHandler::iGetSize(), LASTNODE, M, ER_Rot::MatR, Mat3x3::MulTV(), NODE1, NODE2, Aerodynamic2DElem< 2 >::OUTA, ER_Rot::Param, pdsf2, pdsi2, Aerodynamic2DElem< 2 >::pIndVel, pNode, SubVectorHandler::PutRowIndex(), Vec3::PutTo(), Ra1, Ra2, Vec3::Reset(), AerodynamicOutput::ResetIterator(), AeroData::SetAirData(), AerodynamicOutput::SetData(), AeroData::SetSectionData(), ShapeFunc2N(), grad::sin(), Aerodynamic2DElem< 2 >::TipLoss, Aerodynamic2DElem< 2 >::Twist, Aerodynamic2DElem< 2 >::VelocityPoint, and Zero3.
Referenced by AssRes(), and InitialAssRes().
|
inlinevirtual |
Implements AerodynamicElem.
Definition at line 525 of file aeroelem.h.
References AerodynamicElem::AERODYNAMICBEAM.
|
inlinevirtual |
Reimplemented from Elem.
Definition at line 535 of file aeroelem.h.
|
virtual |
Implements SubjectToInitialAssembly.
Definition at line 2874 of file aeroelem.cc.
References AssVec(), DEBUGCOUTFNAME, StructDispNode::iGetFirstPositionIndex(), NODE1, NODE2, pNode, SubVectorHandler::PutRowIndex(), and VectorHandler::ResizeReset().
|
virtual |
Reimplemented from ToBeOutput.
Definition at line 3108 of file aeroelem.cc.
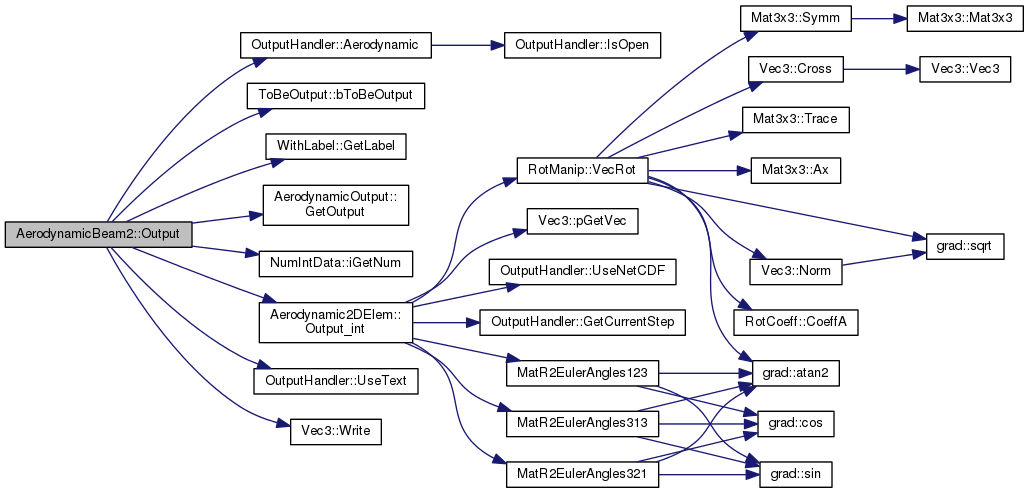
References AerodynamicOutput::AEROD_OUT_NODE, AerodynamicOutput::AEROD_OUT_PGAUSS, AerodynamicOutput::AEROD_OUT_STD, OutputHandler::AERODYNAMIC, OutputHandler::Aerodynamic(), ASSERT, ToBeOutput::bToBeOutput(), DEBUGCOUTFNAME, F, Aerodynamic2DElem< 2 >::GDI, WithLabel::GetLabel(), AerodynamicOutput::GetOutput(), NumIntData::iGetNum(), M, NODE1, NODE2, Aerodynamic2DElem< 2 >::OUTA, Aerodynamic2DElem< iNN >::Output_int(), AerodynamicOutput::OutputData, pBeam, OutputHandler::UseText(), and Vec3::Write().
|
virtual |
Implements Elem.
Definition at line 2498 of file aeroelem.cc.
References Aerodynamic2DElem< 2 >::aerodata, Aerodynamic2DElem< 2 >::Chord, DEBUGCOUTFNAME, f1, f2, Aerodynamic2DElem< 2 >::ForcePoint, Aerodynamic2DElem< 2 >::GDI, WithLabel::GetLabel(), Mat3x3::GetVec(), NumIntData::iGetNum(), pBeam, DriveOwner::pGetDriveCaller(), ShapeOwner::pGetShape(), Aerodynamic2DElem< 2 >::pIndVel, Ra1, Ra2, Shape::Restart(), AeroData::Restart(), DriveCaller::Restart(), Aerodynamic2DElem< 2 >::Twist, Aerodynamic2DElem< 2 >::VelocityPoint, Write(), and Vec3::Write().

Definition at line 469 of file aeroelem.h.
|
protected |
Definition at line 458 of file aeroelem.h.
|
protected |
Definition at line 459 of file aeroelem.h.
Definition at line 470 of file aeroelem.h.
|
protected |
Definition at line 455 of file aeroelem.h.
Referenced by AerodynamicBeam2(), Output(), and Restart().
|
protected |
Definition at line 456 of file aeroelem.h.
Referenced by AerodynamicBeam2(), AssJac(), AssRes(), AssVec(), and InitialAssRes().
|
protected |
Definition at line 460 of file aeroelem.h.
|
protected |
Definition at line 462 of file aeroelem.h.
|
protected |
Definition at line 461 of file aeroelem.h.
|
protected |
Definition at line 463 of file aeroelem.h.
 1.8.7
1.8.7 
