|
MBDyn-1.7.3
|
|
MBDyn-1.7.3
|
Go to the source code of this file.
Functions | |
| void | ComputeInterpolation (const Vec3 *const node_pos, const Mat3x3 *const node_or, const Vec3 *const node_f, const doublereal w, const doublereal wder, Vec3 &pos, Mat3x3 &orient, Vec3 &F, Vec3 &om) |
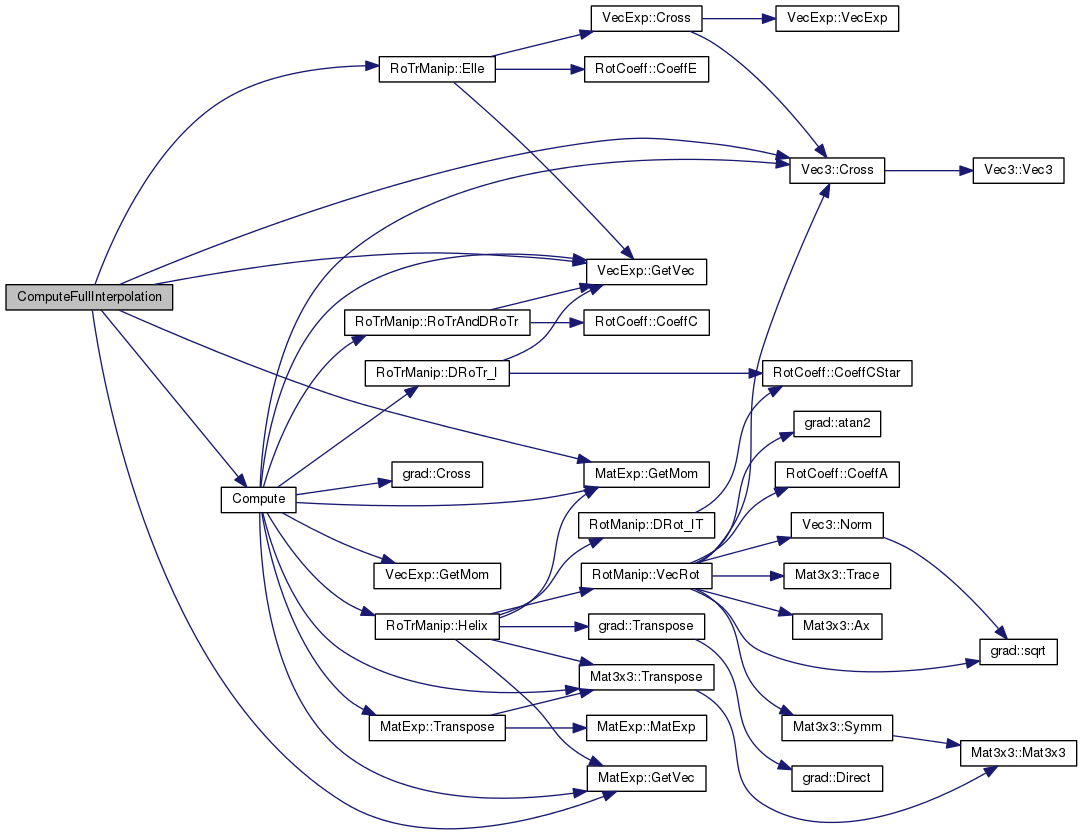
| void | ComputeFullInterpolation (const Vec3 *const node_pos, const Mat3x3 *const node_or, const Vec3 *const node_f, const doublereal w, const doublereal wder, Vec3 &pos, Mat3x3 &orient, Mat3x3 *const or_delta_w_or, Mat3x3 *const delta_pos_w_or, Mat3x3 *const delta_pos_w_pos, Vec3 &F, Vec3 &om, Mat3x3 *const delta_om_ws_or, Mat3x3 *const delta_F_ws_or, Mat3x3 *const delta_F_ws_pos) |
| void ComputeFullInterpolation | ( | const Vec3 *const | node_pos, |
| const Mat3x3 *const | node_or, | ||
| const Vec3 *const | node_f, | ||
| const doublereal | w, | ||
| const doublereal | wder, | ||
| Vec3 & | pos, | ||
| Mat3x3 & | orient, | ||
| Mat3x3 *const | or_delta_w_or, | ||
| Mat3x3 *const | delta_pos_w_or, | ||
| Mat3x3 *const | delta_pos_w_pos, | ||
| Vec3 & | F, | ||
| Vec3 & | om, | ||
| Mat3x3 *const | delta_om_ws_or, | ||
| Mat3x3 *const | delta_F_ws_or, | ||
| Mat3x3 *const | delta_F_ws_pos | ||
| ) |
Definition at line 148 of file hbeam_interp.cc.
References Compute(), Vec3::Cross(), RoTrManip::Elle(), Eye3, MatExp::GetMom(), VecExp::GetVec(), MatExp::GetVec(), MatCross, NODE1, NODE2, and NUMNODES.
Referenced by HBeam::AssStiffnessMat().
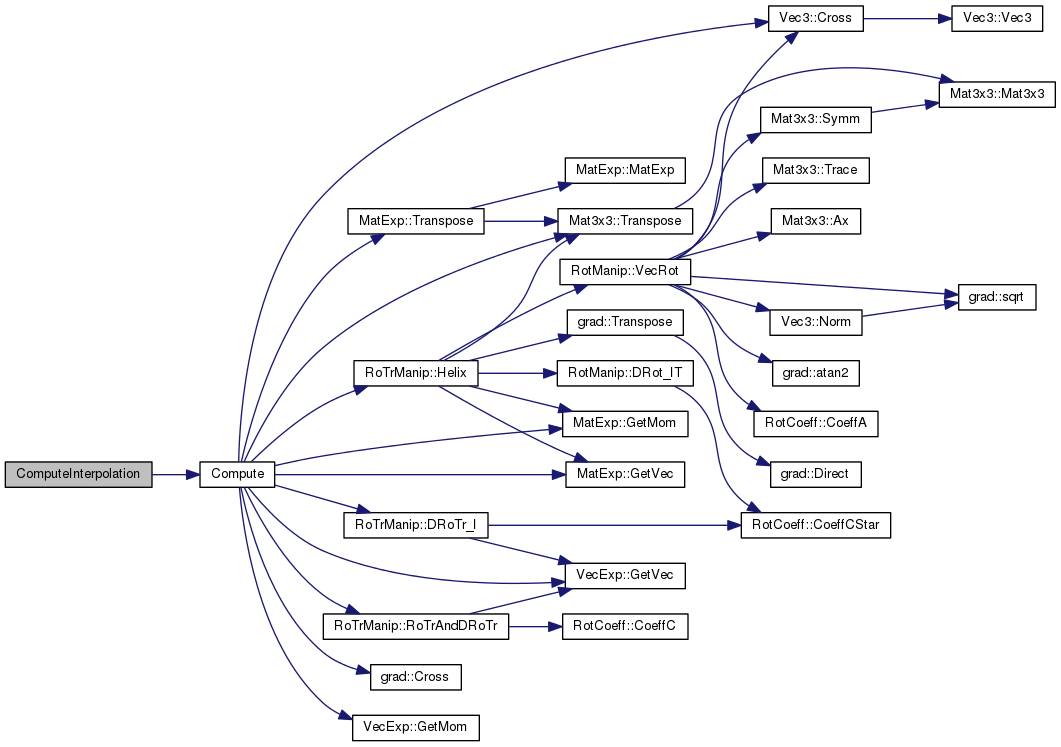
| void ComputeInterpolation | ( | const Vec3 *const | node_pos, |
| const Mat3x3 *const | node_or, | ||
| const Vec3 *const | node_f, | ||
| const doublereal | w, | ||
| const doublereal | wder, | ||
| Vec3 & | pos, | ||
| Mat3x3 & | orient, | ||
| Vec3 & | F, | ||
| Vec3 & | om | ||
| ) |
Definition at line 132 of file hbeam_interp.cc.
References Compute().
Referenced by HBeam::AssStiffnessVec(), and HBeam::DsDxi().
 1.8.7
1.8.7 
