|
MBDyn-1.7.3
|
|
MBDyn-1.7.3
|
#include <reffrm.h>
Public Member Functions | |
| ReferenceFrame (void) | |
| ReferenceFrame (unsigned int uLabel, const Vec3 &xIn, const Mat3x3 &RIn, const Vec3 &vIn, const Vec3 &wIn, const OrientationDescription &ood) | |
| ReferenceFrame (const RigidBodyKinematics *pRBK) | |
| ~ReferenceFrame (void) | |
| const Vec3 & | GetX (void) const |
| const Mat3x3 & | GetR (void) const |
| const Vec3 & | GetV (void) const |
| const Vec3 & | GetW (void) const |
| const Vec3 & | GetXPP (void) const |
| const Vec3 & | GetWP (void) const |
| ReferenceFrame & | operator= (const ReferenceFrame &rf) |
| std::ostream & | Output (std::ostream &out) const |
 Public Member Functions inherited from WithLabel Public Member Functions inherited from WithLabel | |
| WithLabel (unsigned int uL=0, const std::string &sN="") | |
| virtual | ~WithLabel (void) |
| void | PutLabel (unsigned int uL) |
| void | PutName (const std::string &sN) |
| unsigned int | GetLabel (void) const |
| const std::string & | GetName (void) const |
| Public Member Functions inherited from RigidBodyKinematics | |
| virtual | ~RigidBodyKinematics (void) |
| virtual void | Update (void) |
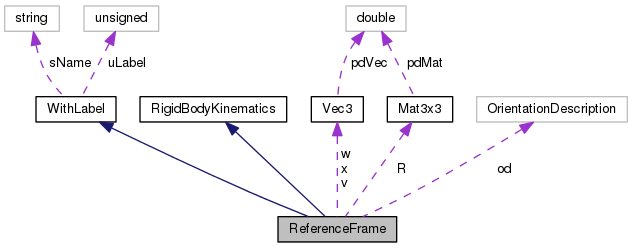
Private Attributes | |
| Vec3 | x |
| Mat3x3 | R |
| Vec3 | v |
| Vec3 | w |
| OrientationDescription | od |
Additional Inherited Members | |
| Protected Attributes inherited from WithLabel | |
| unsigned int | uLabel |
| std::string | sName |
| ReferenceFrame::ReferenceFrame | ( | void | ) |
| ReferenceFrame::ReferenceFrame | ( | unsigned int | uLabel, |
| const Vec3 & | xIn, | ||
| const Mat3x3 & | RIn, | ||
| const Vec3 & | vIn, | ||
| const Vec3 & | wIn, | ||
| const OrientationDescription & | ood | ||
| ) |
Definition at line 52 of file reffrm.cc.
References ASSERT, IsSame(), Mat3x3::MulTM(), and R.

| ReferenceFrame::ReferenceFrame | ( | const RigidBodyKinematics * | pRBK | ) |
Definition at line 61 of file reffrm.cc.
References ASSERT, Eye3, Mat3x3::IsSame(), Mat3x3::MulTM(), and R.

| ReferenceFrame::~ReferenceFrame | ( | void | ) |
|
virtual |
Implements RigidBodyKinematics.
Definition at line 81 of file reffrm.cc.
References R.
Referenced by MBDynParser::GetMatAbs(), MBDynParser::GetMatRel(), MBDynParser::GetOmeAbs(), MBDynParser::GetOmeRel(), MBDynParser::GetPosAbs(), MBDynParser::GetPosRel(), MBDynParser::GetRotAbs(), MBDynParser::GetRotRel(), MBDynParser::GetVecAbs(), MBDynParser::GetVecRel(), MBDynParser::GetVelAbs(), MBDynParser::GetVelRel(), and MBDynParser::Reference_int().
|
virtual |
Implements RigidBodyKinematics.
Definition at line 87 of file reffrm.cc.
References v.
Referenced by MBDynParser::GetVelAbs(), MBDynParser::GetVelRel(), and MBDynParser::Reference_int().
|
virtual |
Implements RigidBodyKinematics.
Definition at line 93 of file reffrm.cc.
References w.
Referenced by MBDynParser::GetOmeAbs(), MBDynParser::GetOmeRel(), MBDynParser::GetVelAbs(), MBDynParser::GetVelRel(), and MBDynParser::Reference_int().
|
virtual |
Implements RigidBodyKinematics.
Definition at line 105 of file reffrm.cc.
References MBDYN_EXCEPT_ARGS.
|
virtual |
Implements RigidBodyKinematics.
Definition at line 75 of file reffrm.cc.
References x.
Referenced by MBDynParser::GetPosAbs(), MBDynParser::GetPosRel(), MBDynParser::GetVelAbs(), MBDynParser::GetVelRel(), and MBDynParser::Reference_int().
|
virtual |
Implements RigidBodyKinematics.
Definition at line 99 of file reffrm.cc.
References MBDYN_EXCEPT_ARGS.
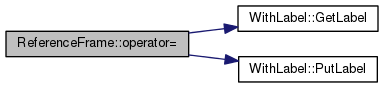
| ReferenceFrame & ReferenceFrame::operator= | ( | const ReferenceFrame & | rf | ) |
Definition at line 111 of file reffrm.cc.
References WithLabel::GetLabel(), od, WithLabel::PutLabel(), R, v, w, and x.
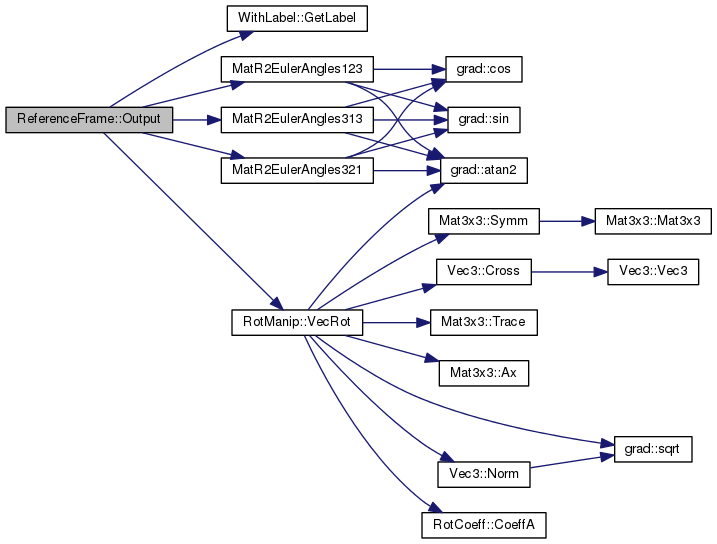
| std::ostream & ReferenceFrame::Output | ( | std::ostream & | out | ) | const |
Definition at line 123 of file reffrm.cc.
References dRaDegr, EULER_123, EULER_313, EULER_321, WithLabel::GetLabel(), MatR2EulerAngles123(), MatR2EulerAngles313(), MatR2EulerAngles321(), MBDYN_EXCEPT_ARGS, od, ORIENTATION_MATRIX, ORIENTATION_VECTOR, R, v, RotManip::VecRot(), w, and x.
|
private |
Definition at line 53 of file reffrm.h.
Referenced by operator=(), and Output().
|
private |
Definition at line 49 of file reffrm.h.
Referenced by GetR(), operator=(), Output(), and ReferenceFrame().
|
private |
Definition at line 50 of file reffrm.h.
Referenced by GetV(), operator=(), and Output().
|
private |
Definition at line 51 of file reffrm.h.
Referenced by GetW(), operator=(), and Output().
|
private |
Definition at line 48 of file reffrm.h.
Referenced by GetX(), operator=(), and Output().
 1.8.7
1.8.7 
