|
MBDyn-1.7.3
|
|
MBDyn-1.7.3
|
#include "mbconfig.h"#include <cassert>#include <ctime>#include <cstdlib>#include <iostream>#include <cmath>#include <typeinfo>#include "ac/f2c.h"#include "clock_time.h"#include "matvec.h"#include "matvec3.h"#include "Rot.hh"#include "matvecass.h"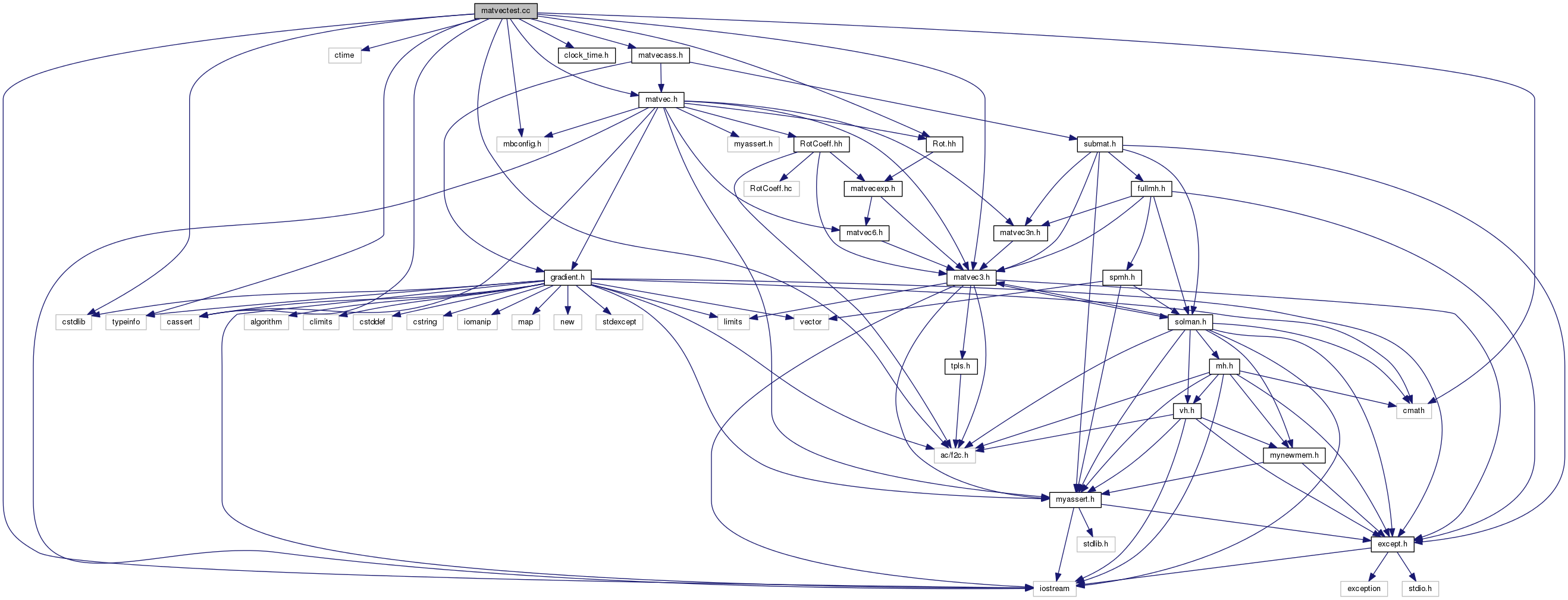
Go to the source code of this file.
Namespaces | |
| testMatVecProductGradient_testData | |
| gradVecAssTest | |
Macros | |
| #define | MATVEC_DEBUG 1 |
| #define | GRADIENT_DEBUG 1 |
Functions | |
| void | tic () |
| void | tic (doublereal &dTime) |
| doublereal | toc () |
| doublereal | random1 () |
| void | testScalarTypeTraits () |
| template<typename T , index_type N> | |
| void | func (const Vector< T, N > &a, const Vector< T, N > &b, Vector< T, N > &c) |
| template<typename T > | |
| void | func (const T a[], const T b[], T c[], index_type N) |
| template<typename T , index_type N> | |
| void | func2 (const Matrix< T, N, N > &A, const Vector< T, N > &b, const Vector< T, N > &c, Vector< T, N > &d, doublereal e, doublereal &dt) |
| template<typename T > | |
| void | func2 (const T *A, const T *b, const T *c__, T *d__, const doublereal &e, doublereal &dt) |
| void | func2ad (const doublereal A[3][3], const doublereal b[3], const doublereal c[3], doublereal d[3], const doublereal &e) |
| void | func2ad_dv (const doublereal A[3][3], const doublereal Ad[3][3][nbdirsmax], const doublereal b[3], const doublereal bd[3][nbdirsmax], const doublereal c[3], const doublereal cd[3][nbdirsmax], doublereal d[3], doublereal dd[3][nbdirsmax], const doublereal &e, const integer &nbdirs) |
| void | func2ad (const Matrix< doublereal, 3, 3 > &A, const Vector< doublereal, 3 > &b, const Vector< doublereal, 3 > &c, Vector< doublereal, 3 > &d, const doublereal &e, LocalDofMap *, doublereal &dt) |
| template<index_type N_SIZE> | |
| void | func2ad (const Matrix< Gradient< N_SIZE >, 3, 3 > &A, const Vector< Gradient< N_SIZE >, 3 > &b, const Vector< Gradient< N_SIZE >, 3 > &c, Vector< Gradient< N_SIZE >, 3 > &d, const doublereal &e, LocalDofMap *pDofMap, doublereal &dt) |
| template<typename T > | |
| void | func3 (const Matrix< T, 3, 3 > &R1, const Matrix< T, 3, 3 > &R2, const Vector< T, 3 > &a, const Vector< T, 3 > &b, Vector< T, 3 > &c, doublereal e) |
| template void | func3< doublereal > (const Matrix< doublereal, 3, 3 > &R1, const Matrix< doublereal, 3, 3 > &R2, const Vector< doublereal, 3 > &a, const Vector< doublereal, 3 > &b, Vector< doublereal, 3 > &c, doublereal e) |
| template void | func3< Gradient< 0 > > (const Matrix< Gradient< 0 >, 3, 3 > &R1, const Matrix< Gradient< 0 >, 3, 3 > &R2, const Vector< Gradient< 0 >, 3 > &a, const Vector< Gradient< 0 >, 3 > &b, Vector< Gradient< 0 >, 3 > &c, doublereal e) |
| template<typename T > | |
| bool | bCompare (const T &a, const T &b, doublereal dTolRel=0.) |
| template<index_type N_SIZE> | |
| bool | bCompare (const Gradient< N_SIZE > &a, const Gradient< N_SIZE > &b, doublereal dTolRel=0.) |
| template<typename T , index_type N> | |
| void | callFunc (LocalDofMap *pDofMap, const Vector< T, N > &a, const Vector< T, N > &b, Vector< T, N > &c, Vector< T, N > &c1) |
| template<typename T > | |
| void | callFunc2 (LocalDofMap *pDofMap, const Matrix< T, 3, 3 > &A, const Vector< T, 3 > &b, const Vector< T, 3 > &c, Vector< T, 3 > &d, Vector< T, 3 > &d_C, Vector< T, 3 > &d_F) |
| template<index_type N> | |
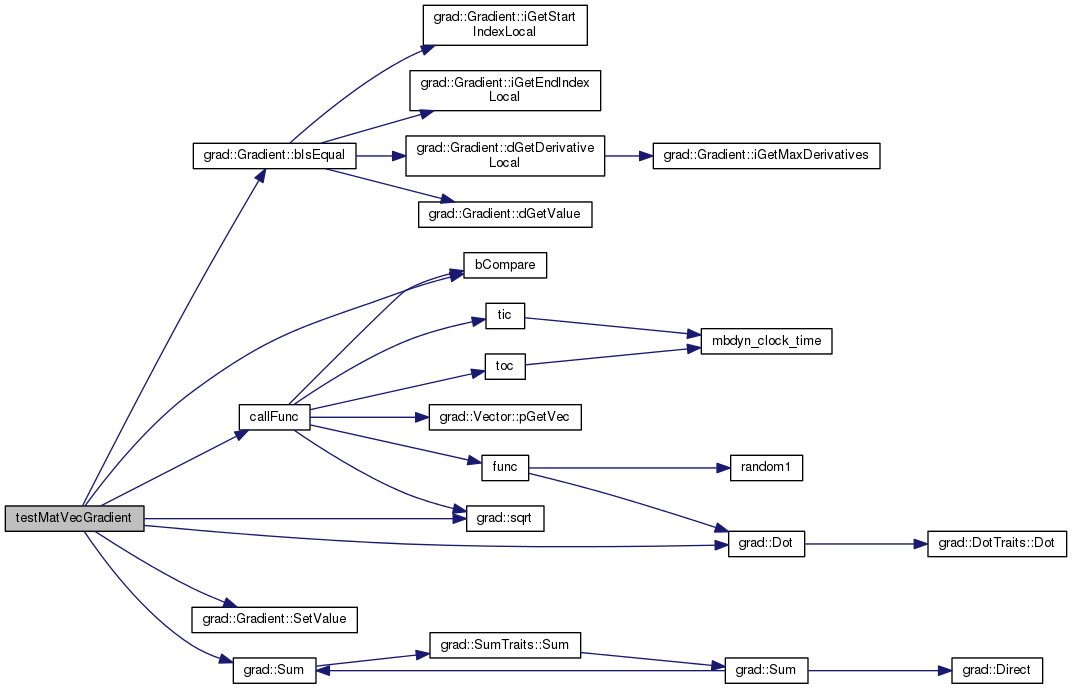
| void | testMatVecGradient (doublereal c_C[N], doublereal cd_C[N][N]) |
| template<index_type N> | |
| void | testMatVecDouble (doublereal c_C[N]) |
| template<index_type N_SIZE> | |
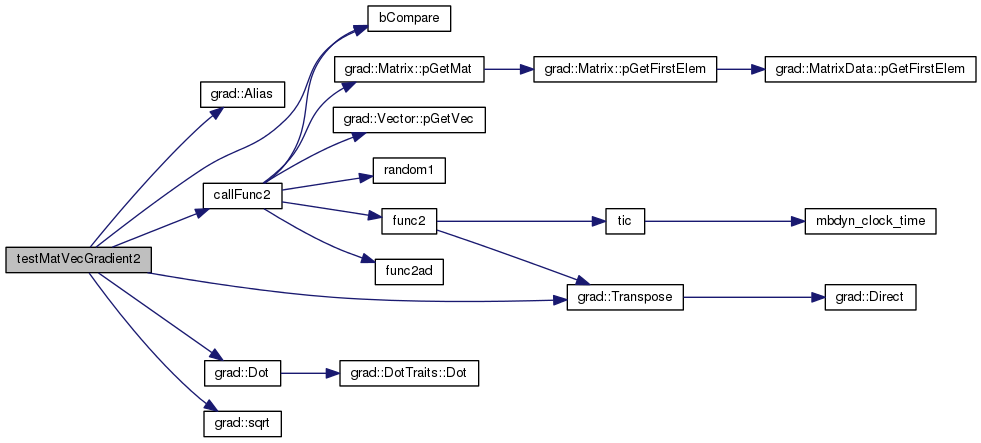
| void | testMatVecGradient2 () |
| void | testMatVecDouble2 () |
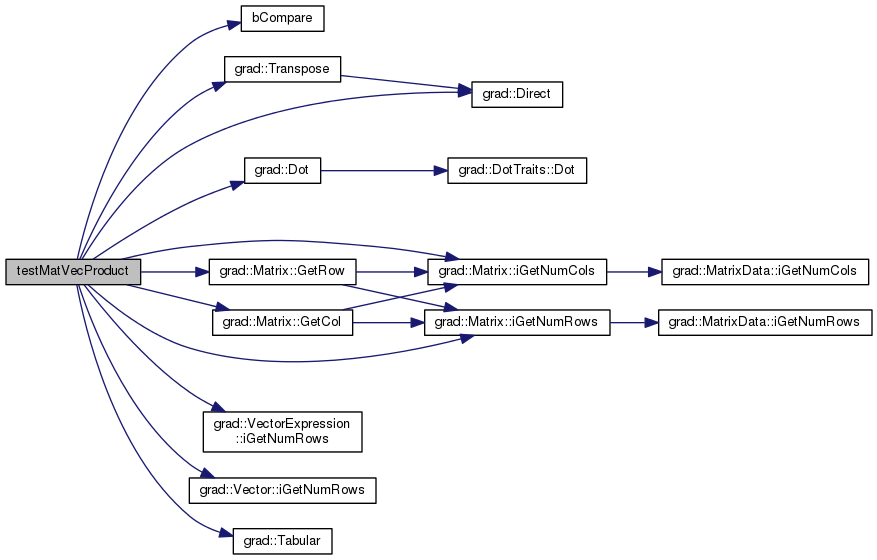
| void | testMatVecProduct () |
| template<typename S , index_type N_rows, index_type N_SIZE> | |
| void | testMatVecProductGradient_testData::testGradient (const S &ref, const Vector< Gradient< N_SIZE >, N_rows > &v, doublereal dTol) |
| template<typename S , index_type N_SIZE> | |
| void | testMatVecProductGradient_testData::testGradient (const S &ref, const Gradient< N_SIZE > &g, doublereal dTol) |
| template<typename T , index_type N_rows> | |
| T | Norm_1 (const Vector< T, N_rows > &u) |
| void | func2addad_dv (const doublereal x[], const doublereal xd[], const doublereal y[], const doublereal yd[], doublereal z[], doublereal zd[], const integer &n, const integer &nbdirs) |
| void | func2mulad_dv (const doublereal x[], const doublereal xd[], const doublereal y[], const doublereal yd[], doublereal z[], doublereal zd[], const integer &n, const integer &nbdirs) |
| template<typename T , index_type iRowCount> | |
| void | doVecAdd (const Vector< T, iRowCount > &x, const Vector< T, iRowCount > &y, Vector< T, iRowCount > &z) |
| template<typename T , index_type iRowCount> | |
| void | doVecMul (const Vector< T, iRowCount > &x, const Vector< T, iRowCount > &y, Vector< T, iRowCount > &z) |
| template<index_type iRowCount, index_type iMaxDeriv, typename Function , typename FunctionF77 > | |
| void | testVecOp (const int M, const int N, Function f, FunctionF77 f77, const char *function) |
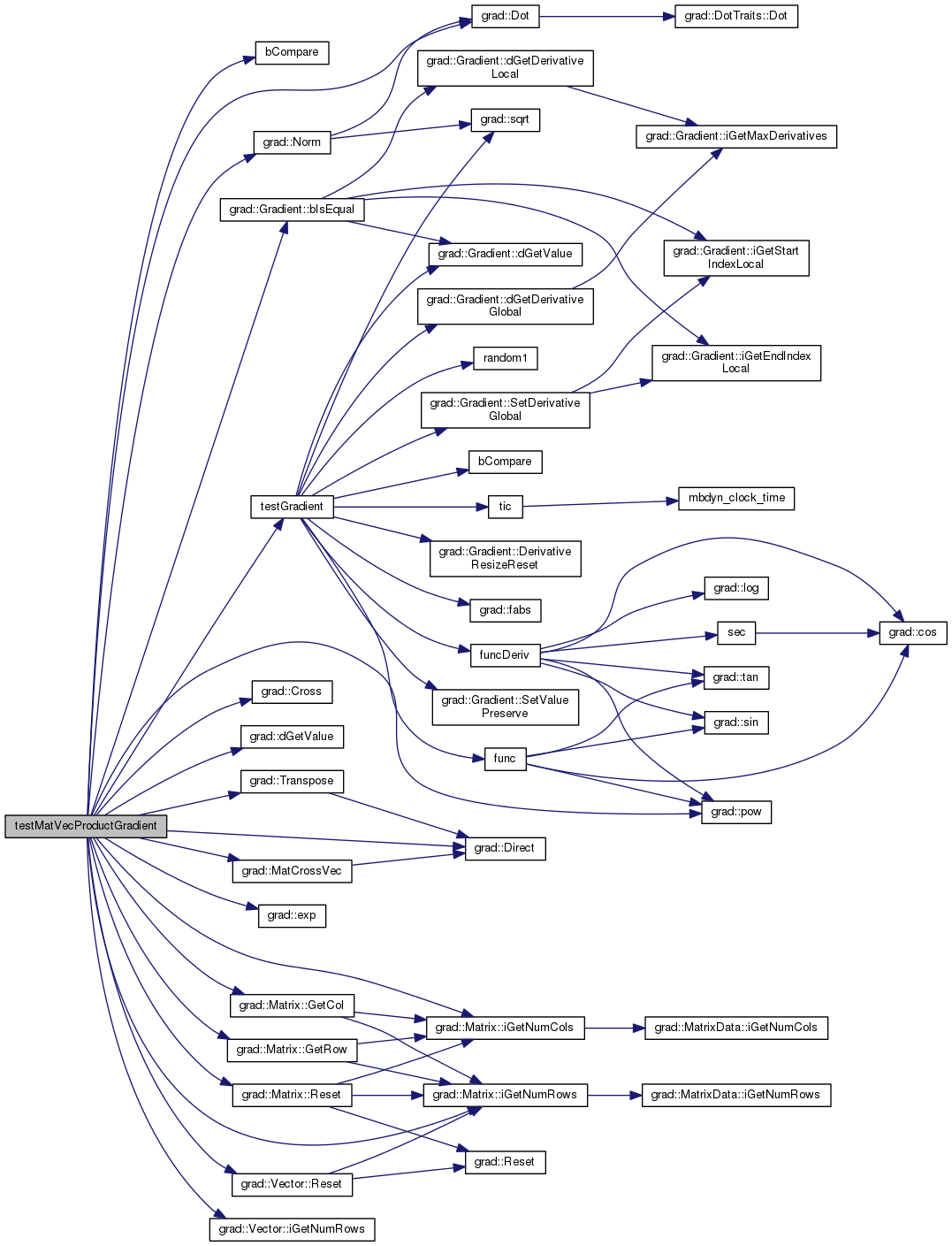
| void | testMatVecProductGradient () |
| template<index_type N_SIZE> | |
| void | testMatVecProductGradient2 (index_type iNumDeriv, int N) |
| template<index_type N_rows> | |
| void | testMatVecCopy () |
| template<typename T > | |
| Matrix< T, 3, 3 > & | gradVecAssTest::Euler123ToMatR (const Vector< T, 3 > &v, Matrix< T, 3, 3 > &R) |
| void | testMatVec3 () |
| void | testSubVecAss () |
| void | testSubVecAssMatVec () |
| void | testInv () |
| void | testSolve () |
| template<index_type N> | |
| void | testMatVec () |
| template<int iNumDofMax> | |
| void | cppad_benchmark1 (const int N) |
| template<int iNumDofMax> | |
| void | cppad_benchmark2 (const int N) |
| template<int iNumDofMax> | |
| void | cppad_benchmark3 (const int N) |
| void | Mat3xN_test (int N, int M) |
| void | MatNxN_test (int N, int M) |
| void | MatDynamic_test (index_type iNumRows, index_type iNumCols, index_type iNumLoops) |
| template<index_type N_SIZE> | |
| void | Mat3xN_test_grad (int iNumDeriv, int N, int M) |
| template<index_type N_SIZE> | |
| void | Mat3xNT_test_grad (int iNumDeriv, int N, int M) |
| template<index_type N_SIZE> | |
| void | MatNxNT_test_grad (int iNumDeriv, int N, int M) |
| template<index_type N_SIZE> | |
| void | MatNxN_test_grad (int iNumDeriv, int N, int M) |
| template<index_type N_SIZE> | |
| void | MatDynamic_test_grad (index_type iNumDeriv, index_type iNumRows, index_type iNumCols, int iNumLoops) |
| template<index_type N_ROWS, index_type N_COLS> | |
| void | MatDynamicT_test (index_type iNumRows, index_type iNumCols, int iNumLoops) |
| template<index_type N_DERIV, index_type N_ROWS, index_type N_COLS> | |
| void | MatDynamicT_test_grad (index_type iNumDeriv, index_type iNumRows, index_type iNumCols, int iNumLoops) |
| void | MatManip_test (int NLoops) |
| int | main (int argc, char *argv[]) |
| #define GRADIENT_DEBUG 1 |
Definition at line 70 of file matvectest.cc.
Referenced by main().
| #define MATVEC_DEBUG 1 |
Definition at line 66 of file matvectest.cc.
Referenced by main().
| bool bCompare | ( | const T & | a, |
| const T & | b, | ||
| doublereal | dTolRel = 0. |
||
| ) |
Definition at line 367 of file matvectest.cc.
Referenced by callFunc(), callFunc2(), Mat3xN_test(), Mat3xN_test_grad(), Mat3xNT_test_grad(), MatDynamic_test(), MatDynamic_test_grad(), MatDynamicT_test(), MatDynamicT_test_grad(), MatManip_test(), MatNxN_test(), MatNxN_test_grad(), MatNxNT_test_grad(), testMatVecProductGradient_testData::testGradient(), testInv(), testMatVec(), testMatVecDouble(), testMatVecGradient(), testMatVecGradient2(), testMatVecProduct(), and testMatVecProductGradient().
| bool bCompare | ( | const Gradient< N_SIZE > & | a, |
| const Gradient< N_SIZE > & | b, | ||
| doublereal | dTolRel = 0. |
||
| ) |
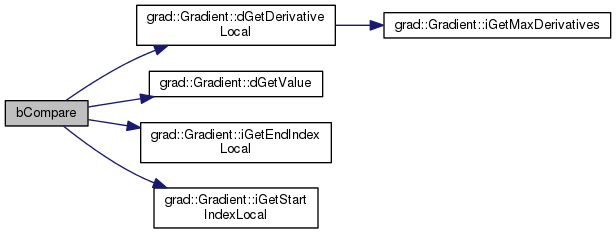
Definition at line 375 of file matvectest.cc.
References grad::Gradient< N_SIZE >::dGetDerivativeLocal(), grad::Gradient< N_SIZE >::dGetValue(), grad::Gradient< N_SIZE >::iGetEndIndexLocal(), and grad::Gradient< N_SIZE >::iGetStartIndexLocal().
| void callFunc | ( | LocalDofMap * | pDofMap, |
| const Vector< T, N > & | a, | ||
| const Vector< T, N > & | b, | ||
| Vector< T, N > & | c, | ||
| Vector< T, N > & | c1 | ||
| ) |
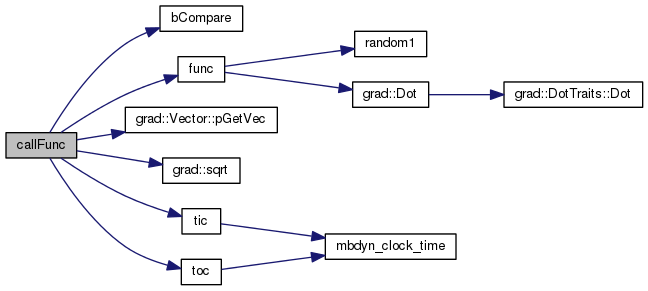
Definition at line 402 of file matvectest.cc.
References bCompare(), c, func(), NLoops, grad::Vector< T, N_rows >::pGetVec(), grad::sqrt(), tic(), and toc().
Referenced by testMatVecDouble(), and testMatVecGradient().
| void callFunc2 | ( | LocalDofMap * | pDofMap, |
| const Matrix< T, 3, 3 > & | A, | ||
| const Vector< T, 3 > & | b, | ||
| const Vector< T, 3 > & | c, | ||
| Vector< T, 3 > & | d, | ||
| Vector< T, 3 > & | d_C, | ||
| Vector< T, 3 > & | d_F | ||
| ) |
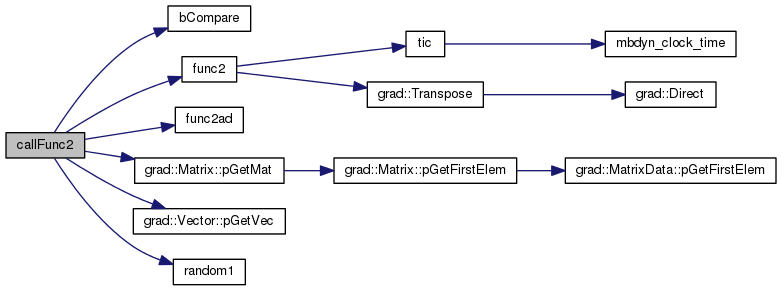
Definition at line 432 of file matvectest.cc.
References bCompare(), func2(), func2ad(), NLoops, grad::Matrix< T, N_rows, N_cols >::pGetMat(), grad::Vector< T, N_rows >::pGetVec(), and random1().
Referenced by testMatVecDouble2(), and testMatVecGradient2().
| void cppad_benchmark1 | ( | const int | N | ) |
Definition at line 2919 of file matvectest.cc.
References dof, gradVecAssTest::Euler123ToMatR(), grad::MapVectorBase::GLOBAL, mbdyn_clock_time(), and R.
| void cppad_benchmark2 | ( | const int | N | ) |
Definition at line 2977 of file matvectest.cc.
References dof, gradVecAssTest::Euler123ToMatR(), grad::MapVectorBase::GLOBAL, and mbdyn_clock_time().
| void cppad_benchmark3 | ( | const int | N | ) |
Definition at line 3045 of file matvectest.cc.
References dof, gradVecAssTest::Euler123ToMatR(), grad::MapVectorBase::GLOBAL, mbdyn_clock_time(), and grad::Transpose().
| void doVecAdd | ( | const Vector< T, iRowCount > & | x, |
| const Vector< T, iRowCount > & | y, | ||
| Vector< T, iRowCount > & | z | ||
| ) |
Definition at line 1297 of file matvectest.cc.
| void doVecMul | ( | const Vector< T, iRowCount > & | x, |
| const Vector< T, iRowCount > & | y, | ||
| Vector< T, iRowCount > & | z | ||
| ) |
Definition at line 1303 of file matvectest.cc.
References grad::Vector< T, N_rows >::iGetNumRows().

| void func | ( | const Vector< T, N > & | a, |
| const Vector< T, N > & | b, | ||
| Vector< T, N > & | c | ||
| ) |
Definition at line 200 of file matvectest.cc.
References grad::Dot(), and random1().
Referenced by callFunc().
| void func | ( | const T | a[], |
| const T | b[], | ||
| T | c[], | ||
| index_type | N | ||
| ) |
Definition at line 210 of file matvectest.cc.
References random1().

| void func2 | ( | const Matrix< T, N, N > & | A, |
| const Vector< T, N > & | b, | ||
| const Vector< T, N > & | c, | ||
| Vector< T, N > & | d, | ||
| doublereal | e, | ||
| doublereal & | dt | ||
| ) |
Definition at line 228 of file matvectest.cc.
References c, tic(), and grad::Transpose().
Referenced by callFunc2().
| void func2 | ( | const T * | A, |
| const T * | b, | ||
| const T * | c__, | ||
| T * | d__, | ||
| const doublereal & | e, | ||
| doublereal & | dt | ||
| ) |
Definition at line 237 of file matvectest.cc.
References tic().

| void func2ad | ( | const doublereal | A[3][3], |
| const doublereal | b[3], | ||
| const doublereal | c[3], | ||
| doublereal | d[3], | ||
| const doublereal & | e | ||
| ) |
Referenced by callFunc2().
|
inline |
Definition at line 297 of file matvectest.cc.
References grad::Vector< T, N_rows >::pGetVec(), and tic().

|
inline |
Definition at line 317 of file matvectest.cc.
References c, grad::Gradient< N_SIZE >::dGetDerivativeGlobal(), grad::Gradient< N_SIZE >::dGetValue(), grad::MapVectorBase::GLOBAL, nbdirsmax, and tic().
| void func2ad_dv | ( | const doublereal | A[3][3], |
| const doublereal | Ad[3][3][nbdirsmax], | ||
| const doublereal | b[3], | ||
| const doublereal | bd[3][nbdirsmax], | ||
| const doublereal | c[3], | ||
| const doublereal | cd[3][nbdirsmax], | ||
| doublereal | d[3], | ||
| doublereal | dd[3][nbdirsmax], | ||
| const doublereal & | e, | ||
| const integer & | nbdirs | ||
| ) |
| void func2addad_dv | ( | const doublereal | x[], |
| const doublereal | xd[], | ||
| const doublereal | y[], | ||
| const doublereal | yd[], | ||
| doublereal | z[], | ||
| doublereal | zd[], | ||
| const integer & | n, | ||
| const integer & | nbdirs | ||
| ) |
Referenced by main().
| void func2mulad_dv | ( | const doublereal | x[], |
| const doublereal | xd[], | ||
| const doublereal | y[], | ||
| const doublereal | yd[], | ||
| doublereal | z[], | ||
| doublereal | zd[], | ||
| const integer & | n, | ||
| const integer & | nbdirs | ||
| ) |
Referenced by main().
| void func3 | ( | const Matrix< T, 3, 3 > & | R1, |
| const Matrix< T, 3, 3 > & | R2, | ||
| const Vector< T, 3 > & | a, | ||
| const Vector< T, 3 > & | b, | ||
| Vector< T, 3 > & | c, | ||
| doublereal | e | ||
| ) |
Definition at line 356 of file matvectest.cc.
References grad::Cross().

| template void func3< doublereal > | ( | const Matrix< doublereal, 3, 3 > & | R1, |
| const Matrix< doublereal, 3, 3 > & | R2, | ||
| const Vector< doublereal, 3 > & | a, | ||
| const Vector< doublereal, 3 > & | b, | ||
| Vector< doublereal, 3 > & | c, | ||
| doublereal | e | ||
| ) |
| template void func3< Gradient< 0 > > | ( | const Matrix< Gradient< 0 >, 3, 3 > & | R1, |
| const Matrix< Gradient< 0 >, 3, 3 > & | R2, | ||
| const Vector< Gradient< 0 >, 3 > & | a, | ||
| const Vector< Gradient< 0 >, 3 > & | b, | ||
| Vector< Gradient< 0 >, 3 > & | c, | ||
| doublereal | e | ||
| ) |
Definition at line 3746 of file matvectest.cc.
References func2addad_dv(), func2mulad_dv(), GRADIENT_DEBUG, Mat3xN_test(), MatDynamic_test(), MatManip_test(), MatNxN_test(), MATVEC_DEBUG, NLoops, testInv(), testMatVec3(), testMatVecDouble2(), testMatVecProduct(), testMatVecProductGradient(), testScalarTypeTraits(), testSolve(), testSubVecAss(), and testSubVecAssMatVec().
Definition at line 3116 of file matvectest.cc.
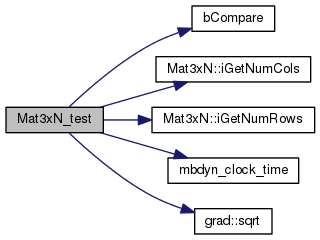
References bCompare(), Mat3xN::iGetNumCols(), Mat3xN::iGetNumRows(), mbdyn_clock_time(), and grad::sqrt().
Referenced by main().
Definition at line 3238 of file matvectest.cc.
References bCompare(), dof, grad::DYNAMIC_SIZE, Mat3xN::iGetNumCols(), Mat3xN::iGetNumRows(), grad::MapVectorBase::LOCAL, mbdyn_clock_time(), and grad::sqrt().
Definition at line 3294 of file matvectest.cc.
References bCompare(), dof, grad::DYNAMIC_SIZE, Mat3xN::iGetNumCols(), Mat3xN::iGetNumRows(), grad::MapVectorBase::LOCAL, mbdyn_clock_time(), grad::sqrt(), and grad::Transpose().
| void MatDynamic_test | ( | index_type | iNumRows, |
| index_type | iNumCols, | ||
| index_type | iNumLoops | ||
| ) |
Definition at line 3196 of file matvectest.cc.
References bCompare(), grad::Matrix< T, N_rows, N_cols >::iGetNumCols(), grad::Matrix< T, N_rows, N_cols >::iGetNumRows(), mbdyn_clock_time(), and grad::sqrt().
Referenced by main().
| void MatDynamic_test_grad | ( | index_type | iNumDeriv, |
| index_type | iNumRows, | ||
| index_type | iNumCols, | ||
| int | iNumLoops | ||
| ) |
Definition at line 3461 of file matvectest.cc.
References bCompare(), dof, grad::DYNAMIC_SIZE, grad::Matrix< T, N_rows, N_cols >::iGetNumCols(), grad::Matrix< T, N_rows, N_cols >::iGetNumRows(), grad::MapVectorBase::LOCAL, mbdyn_clock_time(), and grad::sqrt().
| void MatDynamicT_test | ( | index_type | iNumRows, |
| index_type | iNumCols, | ||
| int | iNumLoops | ||
| ) |
Definition at line 3523 of file matvectest.cc.
References bCompare(), grad::DYNAMIC_SIZE, grad::Matrix< T, N_rows, N_cols >::iGetNumCols(), grad::Matrix< T, N_rows, N_cols >::iGetNumRows(), mbdyn_clock_time(), grad::sqrt(), and grad::Transpose().
| void MatDynamicT_test_grad | ( | index_type | iNumDeriv, |
| index_type | iNumRows, | ||
| index_type | iNumCols, | ||
| int | iNumLoops | ||
| ) |
Definition at line 3570 of file matvectest.cc.
References bCompare(), dof, grad::DYNAMIC_SIZE, grad::Matrix< T, N_rows, N_cols >::GetCol(), grad::Matrix< T, N_rows, N_cols >::GetRow(), grad::Matrix< T, N_rows, N_cols >::iGetNumCols(), grad::Matrix< T, N_rows, N_cols >::iGetNumRows(), grad::MapVectorBase::LOCAL, mbdyn_clock_time(), grad::sqrt(), and grad::Transpose().
| void MatManip_test | ( | int | NLoops | ) |
Definition at line 3645 of file matvectest.cc.
References bCompare(), Eye3, grad::fabs(), M_PI, grad::MatCrossVec(), CGR_Rot::MatG, grad::MatGVec(), CGR_Rot::MatR, grad::MatRVec(), NLoops, Vec3::Norm(), grad::sqrt(), RotManip::VecRot(), and grad::VecRotMat().
Referenced by main().
Definition at line 3156 of file matvectest.cc.
References bCompare(), MatNxN::iGetNumCols(), MatNxN::iGetNumRows(), mbdyn_clock_time(), and grad::sqrt().
Referenced by main().
Definition at line 3404 of file matvectest.cc.
References bCompare(), dof, grad::DYNAMIC_SIZE, MatNxN::iGetNumCols(), MatNxN::iGetNumRows(), grad::MapVectorBase::LOCAL, mbdyn_clock_time(), and grad::sqrt().
Definition at line 3349 of file matvectest.cc.
References bCompare(), dof, grad::DYNAMIC_SIZE, MatNxN::iGetNumCols(), MatNxN::iGetNumRows(), grad::MapVectorBase::LOCAL, mbdyn_clock_time(), grad::sqrt(), and grad::Transpose().
|
inline |
Definition at line 1274 of file matvectest.cc.
References grad::Dot(), and grad::sqrt().
| doublereal random1 | ( | ) |
| void testInv | ( | ) |
Definition at line 2807 of file matvectest.cc.
References bCompare(), grad::Det(), grad::Inv(), grad::sqrt(), and grad::Tabular().
Referenced by main().
| void testMatVec | ( | ) |
Definition at line 2883 of file matvectest.cc.
References bCompare().

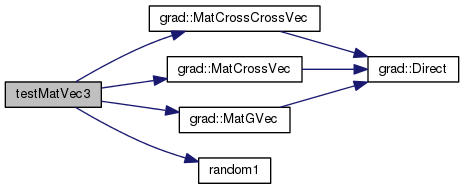
| void testMatVec3 | ( | ) |
Definition at line 2632 of file matvectest.cc.
References MatCross, MatCrossCross, grad::MatCrossCrossVec(), grad::MatCrossVec(), CGR_Rot::MatG, grad::MatGVec(), NLoops, and random1().
Referenced by main().
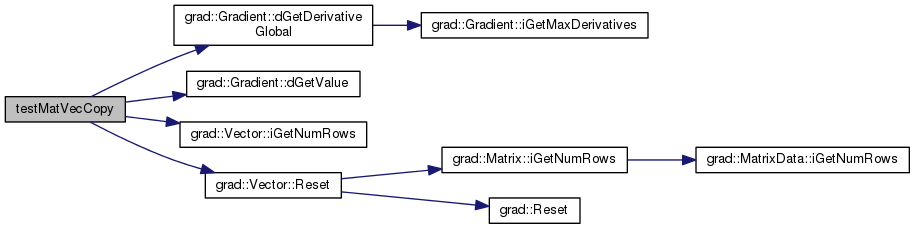
| void testMatVecCopy | ( | ) |
Definition at line 1750 of file matvectest.cc.
References grad::Gradient< N_SIZE >::dGetDerivativeGlobal(), grad::Gradient< N_SIZE >::dGetValue(), grad::MapVectorBase::GLOBAL, grad::Vector< T, N_rows >::iGetNumRows(), and grad::Vector< T, N_rows >::Reset().
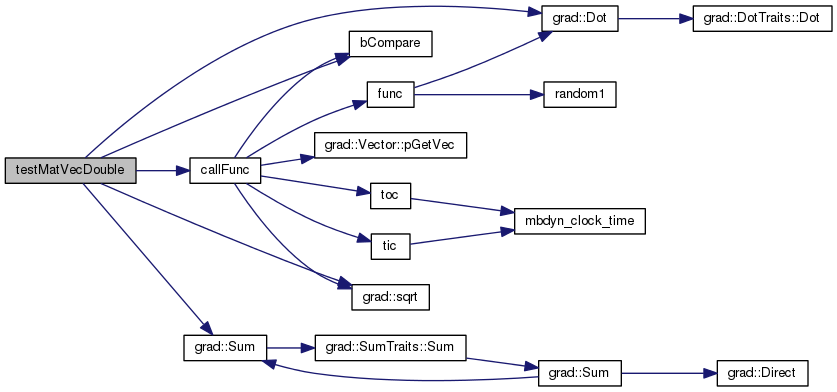
| void testMatVecDouble | ( | doublereal | c_C[N] | ) |
Definition at line 635 of file matvectest.cc.
References a, bCompare(), c, callFunc(), grad::Dot(), grad::sqrt(), and grad::Sum().
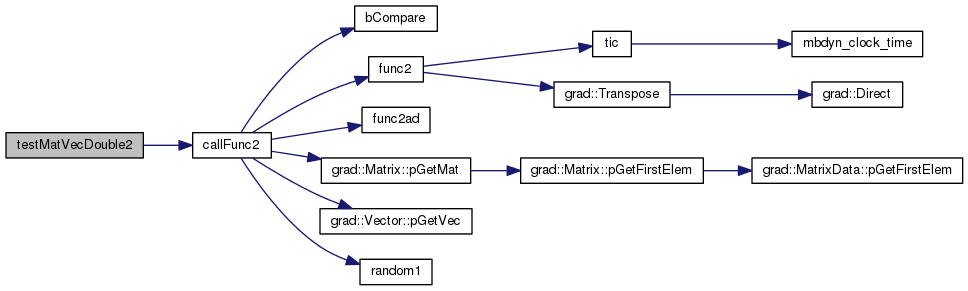
| void testMatVecDouble2 | ( | ) |
Definition at line 832 of file matvectest.cc.
References c, and callFunc2().
Referenced by main().
| void testMatVecGradient | ( | doublereal | c_C[N], |
| doublereal | cd_C[N][N] | ||
| ) |
Definition at line 474 of file matvectest.cc.
References a, bCompare(), grad::Gradient< N_SIZE >::bIsEqual(), c, callFunc(), dof, grad::Dot(), grad::MapVectorBase::GLOBAL, grad::Gradient< N_SIZE >::SetValue(), grad::sqrt(), and grad::Sum().
| void testMatVecGradient2 | ( | ) |
Definition at line 722 of file matvectest.cc.
References grad::Alias(), bCompare(), c, callFunc2(), dof, grad::Dot(), grad::MapVectorBase::GLOBAL, grad::sqrt(), and grad::Transpose().
| void testMatVecProduct | ( | ) |
Definition at line 850 of file matvectest.cc.
References bCompare(), c, grad::Direct(), grad::Dot(), grad::Matrix< T, N_rows, N_cols >::GetCol(), grad::Matrix< T, N_rows, N_cols >::GetRow(), grad::Matrix< T, N_rows, N_cols >::iGetNumCols(), grad::VectorExpression< Expression, N_rows >::iGetNumRows(), grad::Matrix< T, N_rows, N_cols >::iGetNumRows(), grad::Vector< T, N_rows >::iGetNumRows(), R, grad::Tabular(), and grad::Transpose().
Referenced by main().
| void testMatVecProductGradient | ( | ) |
Definition at line 1383 of file matvectest.cc.
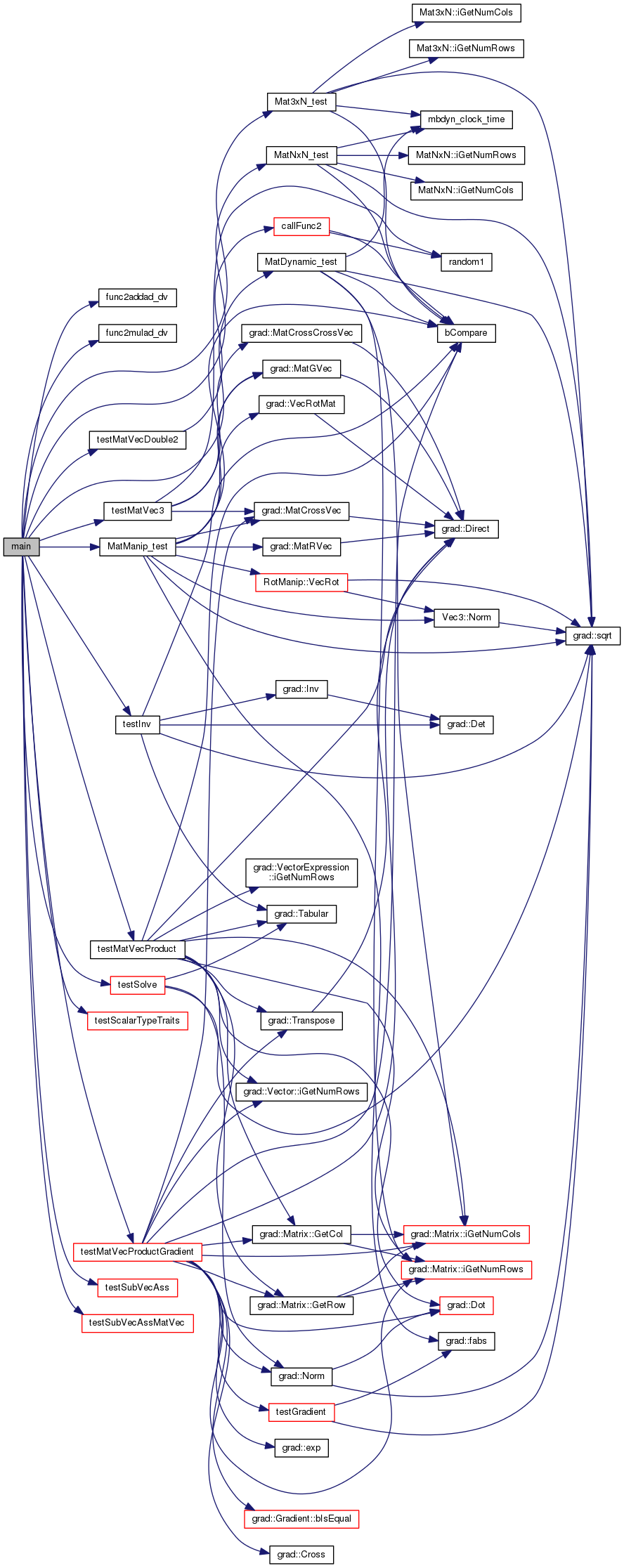
References bCompare(), grad::Gradient< N_SIZE >::bIsEqual(), c, grad::Cross(), grad::dGetValue(), grad::Direct(), dof, grad::Dot(), grad::exp(), grad::Matrix< T, N_rows, N_cols >::GetCol(), grad::Matrix< T, N_rows, N_cols >::GetRow(), grad::MapVectorBase::GLOBAL, gradVecAssTest::I1, grad::Matrix< T, N_rows, N_cols >::iGetNumCols(), grad::Matrix< T, N_rows, N_cols >::iGetNumRows(), grad::Vector< T, N_rows >::iGetNumRows(), grad::MatCrossVec(), grad::Norm(), testMatVecProductGradient_testData::oct_b, testMatVecProductGradient_testData::oct_c, testMatVecProductGradient_testData::oct_d, testMatVecProductGradient_testData::oct_e, testMatVecProductGradient_testData::oct_f, testMatVecProductGradient_testData::oct_g, testMatVecProductGradient_testData::oct_i, testMatVecProductGradient_testData::oct_j, testMatVecProductGradient_testData::oct_l, testMatVecProductGradient_testData::oct_m, testMatVecProductGradient_testData::oct_norm_g, testMatVecProductGradient_testData::oct_r, testMatVecProductGradient_testData::oct_s, testMatVecProductGradient_testData::oct_t, grad::pow(), grad::Matrix< T, N_rows, N_cols >::Reset(), grad::Vector< T, N_rows >::Reset(), testGradient(), and grad::Transpose().
Referenced by main().
| void testMatVecProductGradient2 | ( | index_type | iNumDeriv, |
| int | N | ||
| ) |
Definition at line 1675 of file matvectest.cc.
References dof, grad::MapVectorBase::GLOBAL, grad::Matrix< T, N_rows, N_cols >::iGetNumCols(), grad::Matrix< T, N_rows, N_cols >::iGetNumRows(), and mbdyn_clock_time().

| void testScalarTypeTraits | ( | ) |
Definition at line 92 of file matvectest.cc.
References grad::Gradient< N_SIZE >::iGetMaxDerivatives(), grad::RangeVector< T, N_SIZE >::iGetMaxSize(), and v0.
Referenced by main().
| void testSolve | ( | ) |
Definition at line 2843 of file matvectest.cc.
References Mat3x3::LDLSolve(), grad::Norm(), Mat3x3::Solve(), grad::sqrt(), and grad::Tabular().
Referenced by main().
| void testSubVecAss | ( | ) |
Definition at line 2705 of file matvectest.cc.
References grad::GradientAssVec< doublereal >::AddItem(), grad::Gradient< N_SIZE >::DerivativeResizeReset(), SparseSubMatrixHandler::dGetCoef(), MySubVectorHandler::dGetCoef(), dof, grad::MapVectorBase::GLOBAL, SparseSubMatrixHandler::iGetColIndex(), SparseSubMatrixHandler::iGetNumRows(), SparseSubMatrixHandler::iGetRowIndex(), MySubVectorHandler::iGetSize(), grad::Gradient< N_SIZE >::SetDerivativeGlobal(), and grad::Gradient< N_SIZE >::SetValue().
Referenced by main().
| void testSubVecAssMatVec | ( | ) |
Definition at line 2748 of file matvectest.cc.
References grad::GradientAssVec< doublereal >::AddItem(), grad::GradientAssVecBase::APPEND, SparseSubMatrixHandler::dGetCoef(), MySubVectorHandler::dGetCoef(), dof, grad::MapVectorBase::GLOBAL, SparseSubMatrixHandler::iGetColIndex(), SparseSubMatrixHandler::iGetNumRows(), SparseSubMatrixHandler::iGetRowIndex(), MySubVectorHandler::iGetRowIndex(), and MySubVectorHandler::iGetSize().
Referenced by main().
| void testVecOp | ( | const int | M, |
| const int | N, | ||
| Function | f, | ||
| FunctionF77 | f77, | ||
| const char * | function | ||
| ) |
Definition at line 1312 of file matvectest.cc.
References grad::dGetValue(), dof, grad::MapVectorBase::GLOBAL, grad::Vector< T, N_rows >::iGetNumRows(), and mbdyn_clock_time().
| void tic | ( | ) |
Definition at line 2874 of file matvectest.cc.
References mbdyn_clock_time().
Referenced by callFunc(), func2(), and func2ad().

| void tic | ( | doublereal & | dTime | ) |
Definition at line 2870 of file matvectest.cc.
References mbdyn_clock_time().

| doublereal toc | ( | ) |
Definition at line 2878 of file matvectest.cc.
References dStartTime, and mbdyn_clock_time().
Referenced by callFunc().

| doublereal dStartTime |
Definition at line 2868 of file matvectest.cc.
Referenced by toc().
| const integer nbdirsmax = 12 |
Definition at line 277 of file matvectest.cc.
Referenced by func2ad().
| int NLoops = 1 |
Definition at line 82 of file matvectest.cc.
Referenced by callFunc(), callFunc2(), main(), MatManip_test(), and testMatVec3().
| int NLoopsAss = 1 |
Definition at line 83 of file matvectest.cc.
 1.8.7
1.8.7 
