|
MBDyn-1.7.3
|
|
MBDyn-1.7.3
|
Public Member Functions | |
| CyclocopterUniform1D (unsigned int uL, const DofOwner *pDO, DataManager *pDM, MBDynParser &HP) | |
| virtual | ~CyclocopterUniform1D (void) |
| virtual void | AfterConvergence (const VectorHandler &X, const VectorHandler &XP) |
| virtual void | Output (OutputHandler &OH) const |
| virtual SubVectorHandler & | AssRes (SubVectorHandler &WorkVec, doublereal dCoef, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | AddForce (const Elem *pEl, const StructNode *pNode, const Vec3 &F, const Vec3 &M, const Vec3 &X) |
| virtual Vec3 | GetInducedVelocity (Elem::Type type, unsigned uLabel, unsigned uPnt, const Vec3 &X) const |
| virtual doublereal | GetW (const Vec3 &X) const |
| virtual doublereal | GetPsi (const Vec3 &X) const |
| virtual Mat3x3 | GetRRotor (const Vec3 &X) const |
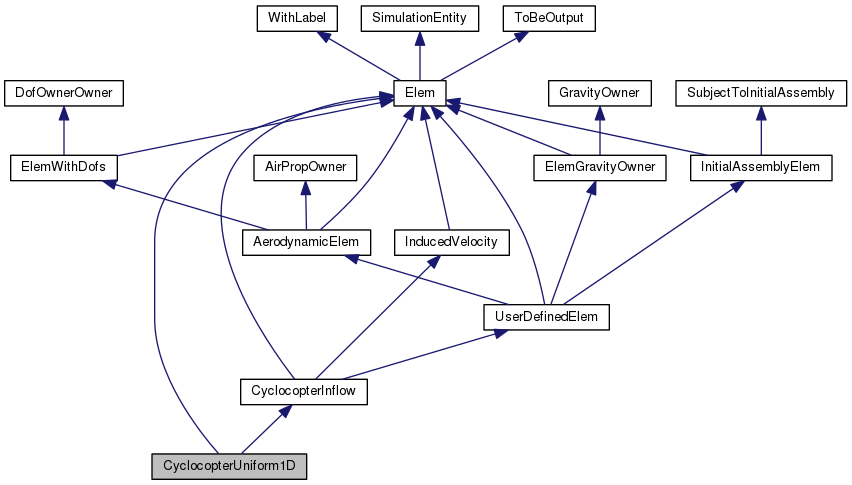
 Public Member Functions inherited from Elem Public Member Functions inherited from Elem | |
| Elem (unsigned int uL, flag fOut) | |
| virtual | ~Elem (void) |
| virtual std::ostream & | DescribeDof (std::ostream &out, const char *prefix="", bool bInitial=false) const |
| virtual void | DescribeDof (std::vector< std::string > &desc, bool bInitial=false, int i=-1) const |
| virtual std::ostream & | DescribeEq (std::ostream &out, const char *prefix="", bool bInitial=false) const |
| virtual void | DescribeEq (std::vector< std::string > &desc, bool bInitial=false, int i=-1) const |
| virtual DofOrder::Order | GetDofType (unsigned int) const |
| virtual void | AssMats (VariableSubMatrixHandler &WorkMatA, VariableSubMatrixHandler &WorkMatB, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual bool | bInverseDynamics (void) const |
| void | SetInverseDynamicsFlags (unsigned uIDF) |
| unsigned | GetInverseDynamicsFlags (void) const |
| bool | bIsErgonomy (void) const |
| bool | bIsRightHandSide (void) const |
| virtual VariableSubMatrixHandler & | AssJac (VariableSubMatrixHandler &WorkMat, const VectorHandler &XCurr) |
| virtual SubVectorHandler & | AssRes (SubVectorHandler &WorkVec, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr, const VectorHandler &XPrimePrimeCurr, InverseDynamics::Order iOrder=InverseDynamics::INVERSE_DYNAMICS) |
| virtual int | GetNumConnectedNodes (void) const |
| Public Member Functions inherited from WithLabel | |
| WithLabel (unsigned int uL=0, const std::string &sN="") | |
| virtual | ~WithLabel (void) |
| void | PutLabel (unsigned int uL) |
| void | PutName (const std::string &sN) |
| unsigned int | GetLabel (void) const |
| const std::string & | GetName (void) const |
| Public Member Functions inherited from SimulationEntity | |
| SimulationEntity (void) | |
| virtual | ~SimulationEntity (void) |
| virtual bool | bIsValidIndex (unsigned int i) const |
| virtual DofOrder::Order | GetEqType (unsigned int i) const |
| virtual Hint * | ParseHint (DataManager *pDM, const char *s) const |
| virtual void | BeforePredict (VectorHandler &, VectorHandler &, VectorHandler &, VectorHandler &) const |
| virtual void | AfterPredict (VectorHandler &X, VectorHandler &XP) |
| virtual void | Update (const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | DerivativesUpdate (const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | Update (const VectorHandler &XCurr, InverseDynamics::Order iOrder) |
| virtual void | AfterConvergence (const VectorHandler &X, const VectorHandler &XP, const VectorHandler &XPP) |
| virtual std::ostream & | OutputAppend (std::ostream &out) const |
| virtual void | ReadInitialState (MBDynParser &HP) |
| Public Member Functions inherited from ToBeOutput | |
| ToBeOutput (flag fOut=fDefaultOut) | |
| virtual | ~ToBeOutput (void) |
| virtual void | OutputPrepare (OutputHandler &OH) |
| virtual void | Output (OutputHandler &OH, const VectorHandler &X, const VectorHandler &XP) const |
| virtual flag | fToBeOutput (void) const |
| virtual bool | bToBeOutput (void) const |
| virtual void | SetOutputFlag (flag f=flag(1)) |
| Public Member Functions inherited from CyclocopterInflow | |
| CyclocopterInflow (unsigned int uL, const DofOwner *pDO) | |
| virtual | ~CyclocopterInflow (void) |
| virtual Elem::Type | GetElemType (void) const |
| virtual InducedVelocity::Type | GetInducedVelocityType (void) const |
| virtual std::ostream & | Restart (std::ostream &out) const |
| virtual void | SetValue (DataManager *pDM, VectorHandler &X, VectorHandler &XP, SimulationEntity::Hints *ph) |
| virtual void | SetInitialValue (VectorHandler &X) |
| virtual void | GetConnectedNodes (std::vector< const Node * > &connectedNodes) const |
| virtual unsigned int | iGetInitialNumDof (void) const |
| virtual void | InitialWorkSpaceDim (integer *piNumRows, integer *piNumCols) const |
| VariableSubMatrixHandler & | InitialAssJac (VariableSubMatrixHandler &WorkMat, const VectorHandler &XCurr) |
| SubVectorHandler & | InitialAssRes (SubVectorHandler &WorkVec, const VectorHandler &XCurr) |
| Public Member Functions inherited from UserDefinedElem | |
| UserDefinedElem (unsigned uLabel, const DofOwner *pDO) | |
| virtual | ~UserDefinedElem (void) |
| bool | NeedsAirProperties (void) const |
| void | NeedsAirProperties (bool yesno) |
| virtual AerodynamicElem::Type | GetAerodynamicElemType (void) const |
| Public Member Functions inherited from InitialAssemblyElem | |
| InitialAssemblyElem (unsigned int uL, flag fOut) | |
| virtual | ~InitialAssemblyElem (void) |
| Public Member Functions inherited from SubjectToInitialAssembly | |
| SubjectToInitialAssembly (void) | |
| virtual | ~SubjectToInitialAssembly (void) |
| Public Member Functions inherited from AerodynamicElem | |
| AerodynamicElem (unsigned int uL, const DofOwner *pDO, flag fOut) | |
| virtual | ~AerodynamicElem (void) |
| virtual const InducedVelocity * | pGetInducedVelocity (void) const |
| Public Member Functions inherited from ElemWithDofs | |
| ElemWithDofs (unsigned int uL, const DofOwner *pDO, flag fOut) | |
| virtual | ~ElemWithDofs (void) |
| Public Member Functions inherited from DofOwnerOwner | |
| DofOwnerOwner (const DofOwner *pDO) | |
| virtual | ~DofOwnerOwner () |
| virtual const DofOwner * | pGetDofOwner (void) const |
| virtual integer | iGetFirstIndex (void) const |
| Public Member Functions inherited from AirPropOwner | |
| AirPropOwner (void) | |
| virtual | ~AirPropOwner (void) |
| virtual void | PutAirProperties (const AirProperties *pAP) |
| virtual flag | fGetAirVelocity (Vec3 &Velocity, const Vec3 &X) const |
| virtual doublereal | dGetAirDensity (const Vec3 &X) const |
| virtual doublereal | dGetAirPressure (const Vec3 &X) const |
| virtual doublereal | dGetAirTemperature (const Vec3 &X) const |
| virtual doublereal | dGetSoundSpeed (const Vec3 &X) const |
| virtual bool | GetAirProps (const Vec3 &X, doublereal &rho, doublereal &c, doublereal &p, doublereal &T) const |
| Public Member Functions inherited from ElemGravityOwner | |
| ElemGravityOwner (unsigned int uL, flag fOut) | |
| virtual | ~ElemGravityOwner (void) |
| virtual doublereal | dGetM (void) const |
| Vec3 | GetS (void) const |
| Mat3x3 | GetJ (void) const |
| Vec3 | GetB (void) const |
| Vec3 | GetG (void) const |
| Public Member Functions inherited from GravityOwner | |
| GravityOwner (void) | |
| virtual | ~GravityOwner (void) |
| void | PutGravity (const Gravity *pG) |
| virtual bool | bGetGravity (const Vec3 &X, Vec3 &Acc) const |
| Public Member Functions inherited from InducedVelocity | |
| InducedVelocity (unsigned int uL, const StructNode *pCraft, ResForceSet **ppres, flag fOut) | |
| virtual | ~InducedVelocity (void) |
| virtual unsigned int | iGetNumPrivData (void) const |
| virtual unsigned int | iGetPrivDataIdx (const char *s) const |
| virtual doublereal | dGetPrivData (unsigned int i) const |
| virtual bool | bSectionalForces (void) const |
| virtual unsigned int | iGetNumDof (void) const |
| virtual const Vec3 & | GetXCurr (void) const |
| virtual const Vec3 & | GetForces (void) const |
| virtual const Vec3 & | GetMoments (void) const |
| virtual void | AddSectionalForce (Elem::Type type, const Elem *pEl, unsigned uPnt, const Vec3 &F, const Vec3 &M, doublereal dW, const Vec3 &X, const Mat3x3 &R, const Vec3 &V, const Vec3 &W) |
| virtual void | ResetForce (void) |
| virtual void | WorkSpaceDim (integer *piNumRows, integer *piNumCols) const |
| virtual VariableSubMatrixHandler & | AssJac (VariableSubMatrixHandler &WorkMat, doublereal dCoef, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
Definition at line 558 of file module-cyclocopter.cc.
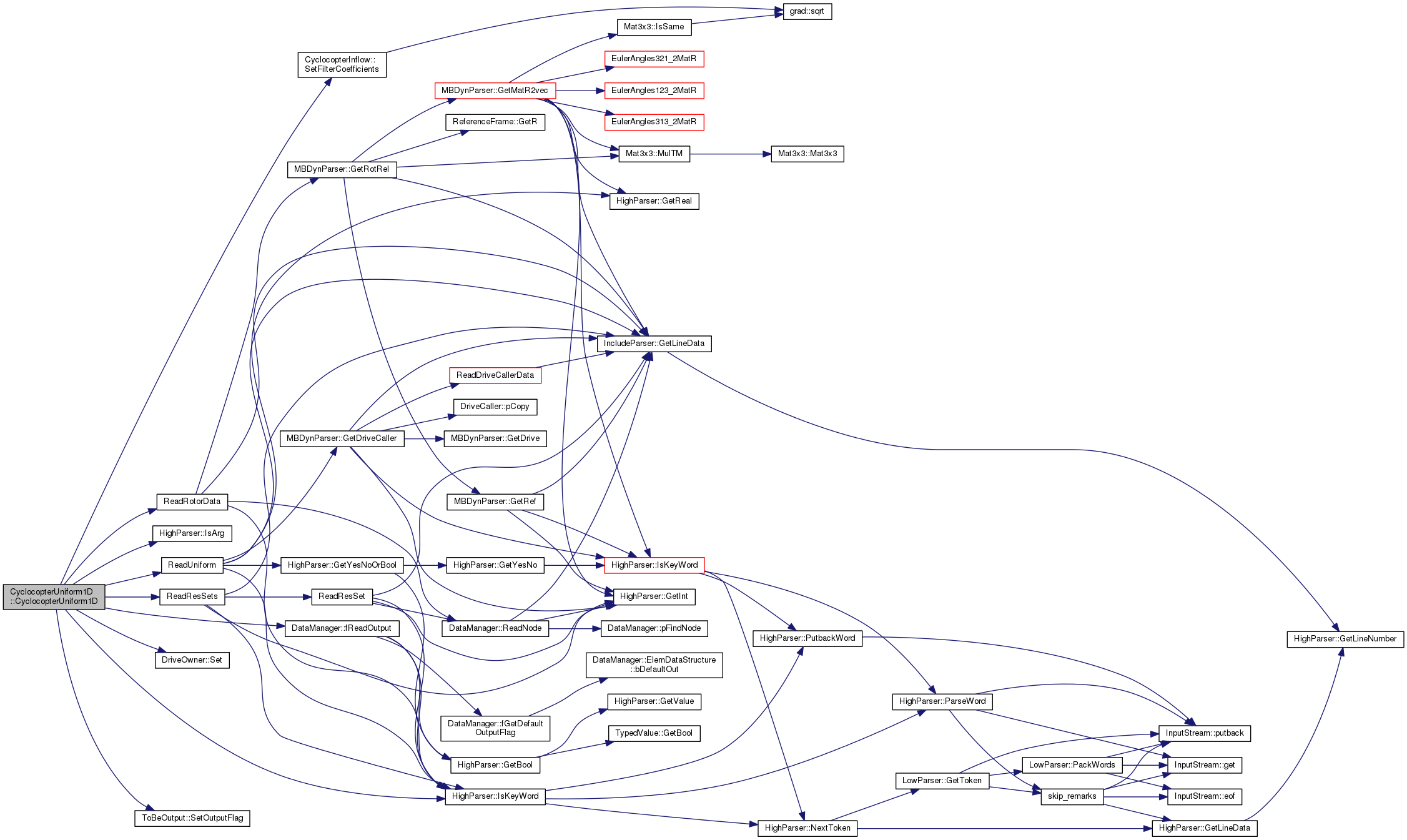
| CyclocopterUniform1D::CyclocopterUniform1D | ( | unsigned int | uL, |
| const DofOwner * | pDO, | ||
| DataManager * | pDM, | ||
| MBDynParser & | HP | ||
| ) |
Definition at line 633 of file module-cyclocopter.cc.
References CyclocopterInflow::bFlagAverage, CyclocopterInflow::dArea, CyclocopterInflow::dKappa, CyclocopterInflow::dRadius, CyclocopterInflow::dSpan, DataManager::fReadOutput(), Elem::INDUCEDVELOCITY, HighParser::IsArg(), HighParser::IsKeyWord(), MBDYN_EXCEPT_ARGS, InducedVelocity::pCraft, InducedVelocity::ppRes, CyclocopterInflow::pRotor, ReadResSets(), ReadRotorData(), ReadUniform(), CyclocopterInflow::RRot, DriveOwner::Set(), CyclocopterInflow::SetFilterCoefficients(), ToBeOutput::SetOutputFlag(), WithLabel::uLabel, and CyclocopterInflow::Weight.
|
virtual |
Definition at line 707 of file module-cyclocopter.cc.
References NO_OP.
|
virtual |
Reimplemented from InducedVelocity.
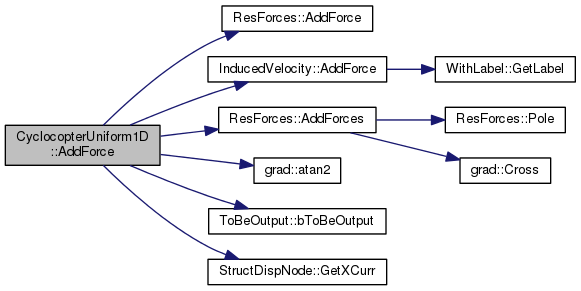
Definition at line 819 of file module-cyclocopter.cc.
References ResForces::AddForce(), InducedVelocity::AddForce(), ResForces::AddForces(), grad::atan2(), bFlagIsFirstBlade, ToBeOutput::bToBeOutput(), dAzimuth, StructDispNode::GetXCurr(), CyclocopterInflow::pRotor, InducedVelocity::Res, and CyclocopterInflow::RRotorTranspose.
|
virtual |
Reimplemented from CyclocopterInflow.
Definition at line 742 of file module-cyclocopter.cc.
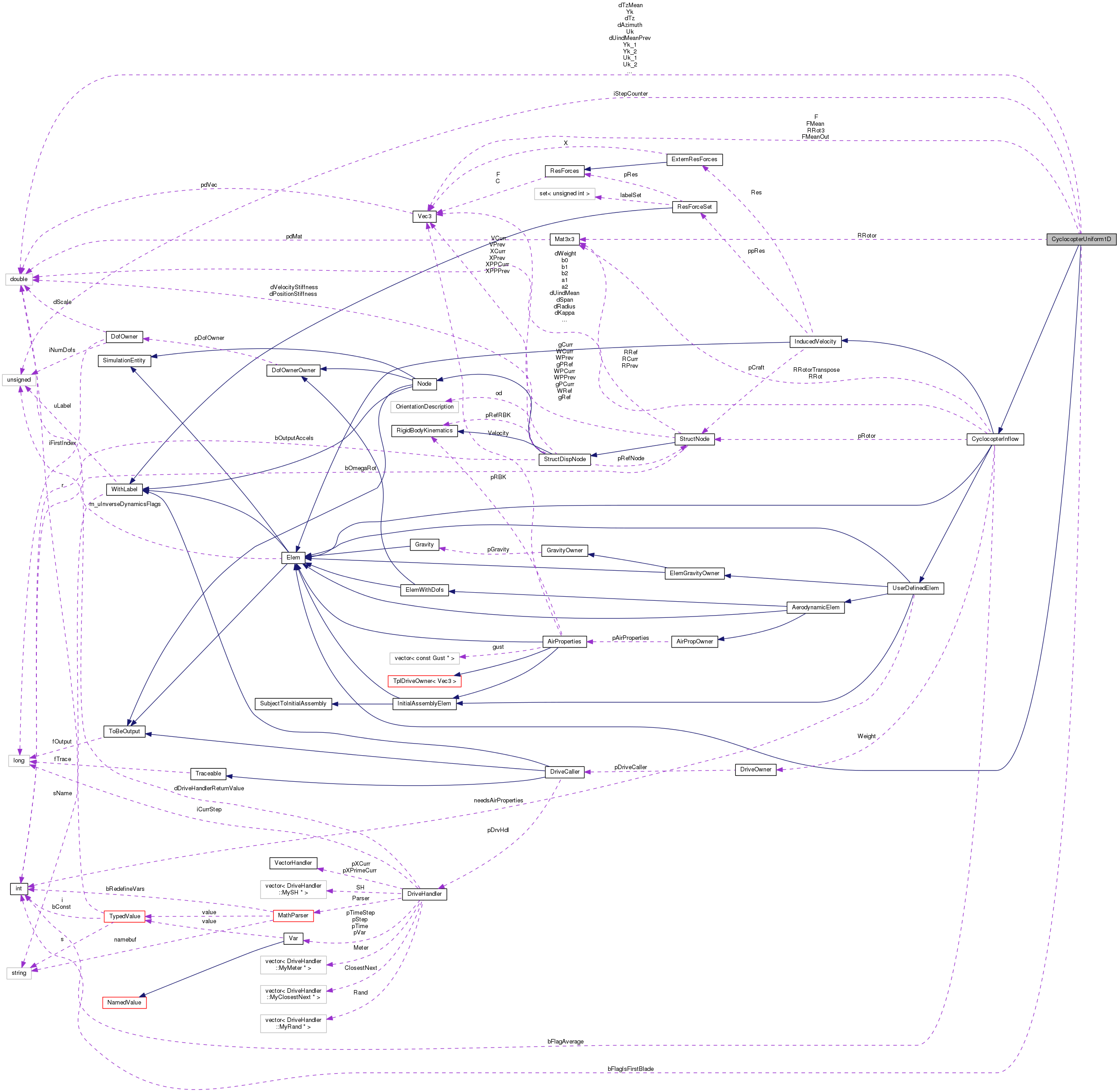
References InducedVelocity::AfterConvergence(), CyclocopterInflow::bFlagAverage, bFlagIsFirstBlade, copysign(), CyclocopterInflow::dArea, dAzimuth, dAzimuthPrev, DriveOwner::dGet(), AirPropOwner::dGetAirDensity(), CyclocopterInflow::dKappa, dTz, dTzMean, CyclocopterInflow::dUindMean, dUindMeanPrev, CyclocopterInflow::dWeight, F, FMean, FMeanOut, WithLabel::GetLabel(), InducedVelocity::GetXCurr(), iStepCounter, grad::sqrt(), Uk, Uk_1, Uk_2, CyclocopterInflow::Weight, Yk, Yk_1, Yk_2, and Zero3.
|
virtual |
Implements Elem.
Definition at line 788 of file module-cyclocopter.cc.
References CyclocopterInflow::a1, CyclocopterInflow::a2, CyclocopterInflow::b0, CyclocopterInflow::b1, CyclocopterInflow::b2, CyclocopterInflow::bFlagAverage, copysign(), CyclocopterInflow::dArea, AirPropOwner::dGetAirDensity(), CyclocopterInflow::dKappa, dTz, CyclocopterInflow::dUindMean, dUindMeanPrev, CyclocopterInflow::dWeight, F, ResForces::Force(), StructNode::GetRCurr(), Mat3x3::GetVec(), InducedVelocity::GetXCurr(), InducedVelocity::pCraft, InducedVelocity::Res, InducedVelocity::ResetForce(), VectorHandler::Resize(), CyclocopterInflow::RRot, RRot3, RRotor, CyclocopterInflow::RRotorTranspose, grad::sqrt(), Mat3x3::Transpose(), Uk, Uk_1, Uk_2, Yk, Yk_1, and Yk_2.
|
virtual |
Implements InducedVelocity.
Definition at line 843 of file module-cyclocopter.cc.
References CyclocopterInflow::dUindMean, and RRot3.
|
inlinevirtual |
Definition at line 624 of file module-cyclocopter.cc.
Definition at line 628 of file module-cyclocopter.cc.
References Zero3x3.
|
inlinevirtual |
Definition at line 620 of file module-cyclocopter.cc.
|
virtual |
Reimplemented from CyclocopterInflow.
Definition at line 713 of file module-cyclocopter.cc.
References ToBeOutput::bToBeOutput(), dAzimuth, CyclocopterInflow::dUindMean, FMeanOut, ResForces::Force(), WithLabel::GetLabel(), iStepCounter, OutputHandler::Loadable(), ResForces::Moment(), InducedVelocity::ppRes, InducedVelocity::Res, and CyclocopterInflow::RRotorTranspose.
|
protected |
Definition at line 566 of file module-cyclocopter.cc.
Referenced by AddForce(), and AfterConvergence().
|
protected |
Definition at line 568 of file module-cyclocopter.cc.
Referenced by AddForce(), AfterConvergence(), and Output().
|
protected |
Definition at line 568 of file module-cyclocopter.cc.
Referenced by AfterConvergence().
|
protected |
Definition at line 570 of file module-cyclocopter.cc.
Referenced by AfterConvergence(), and AssRes().
|
protected |
Definition at line 570 of file module-cyclocopter.cc.
Referenced by AfterConvergence().
|
mutableprotected |
Definition at line 564 of file module-cyclocopter.cc.
Referenced by AfterConvergence(), and AssRes().
|
protected |
Definition at line 571 of file module-cyclocopter.cc.
Referenced by AfterConvergence(), and AssRes().
|
protected |
Definition at line 571 of file module-cyclocopter.cc.
Referenced by AfterConvergence().
|
protected |
Definition at line 571 of file module-cyclocopter.cc.
Referenced by AfterConvergence(), and Output().
|
protected |
Definition at line 573 of file module-cyclocopter.cc.
Referenced by AfterConvergence(), and Output().
|
protected |
Definition at line 561 of file module-cyclocopter.cc.
Referenced by AssRes(), and GetInducedVelocity().
|
protected |
Definition at line 562 of file module-cyclocopter.cc.
Referenced by AssRes().
|
protected |
Definition at line 576 of file module-cyclocopter.cc.
Referenced by AfterConvergence(), and AssRes().
|
protected |
Definition at line 576 of file module-cyclocopter.cc.
Referenced by AfterConvergence(), and AssRes().
|
protected |
Definition at line 576 of file module-cyclocopter.cc.
Referenced by AfterConvergence(), and AssRes().
|
protected |
Definition at line 576 of file module-cyclocopter.cc.
Referenced by AfterConvergence(), and AssRes().
|
protected |
Definition at line 576 of file module-cyclocopter.cc.
Referenced by AfterConvergence(), and AssRes().
|
protected |
Definition at line 576 of file module-cyclocopter.cc.
Referenced by AfterConvergence(), and AssRes().
 1.8.7
1.8.7 
