|
MBDyn-1.7.3
|
|
MBDyn-1.7.3
|
#include "mbconfig.h"#include <limits>#include <cmath>#include "dataman.h"#include "userelem.h"#include "indvel.h"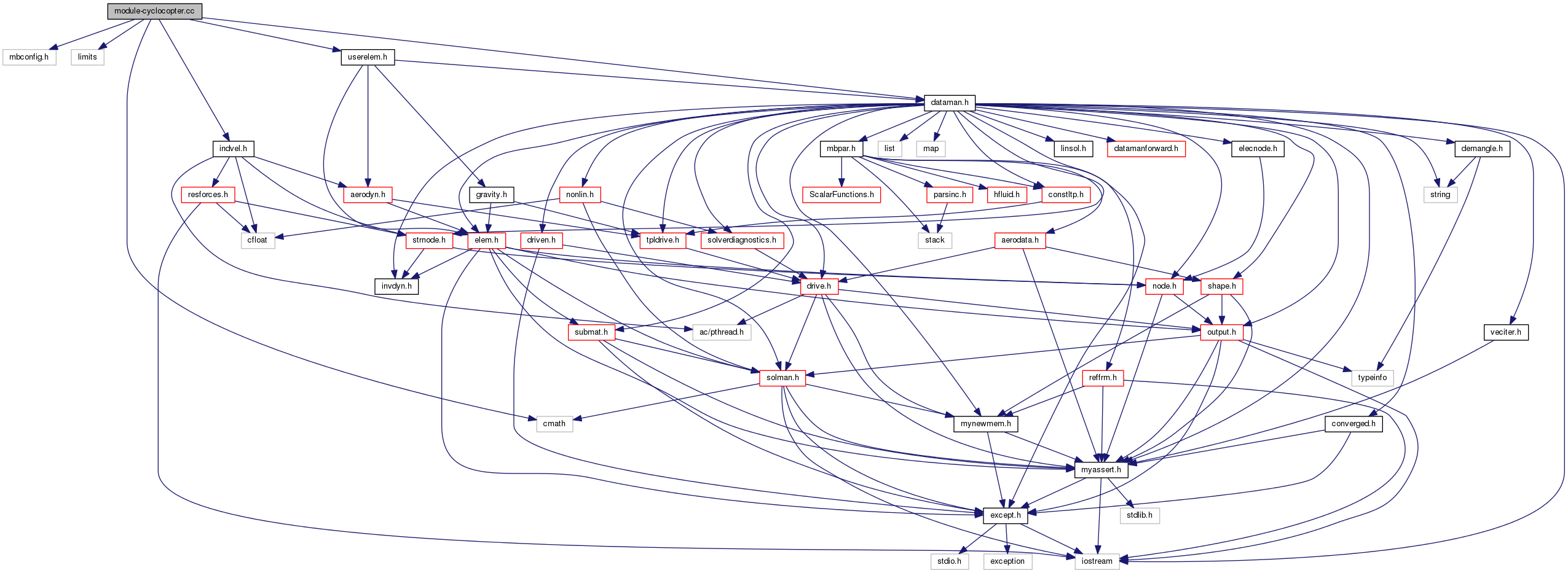
Go to the source code of this file.
Classes | |
| class | CyclocopterInflow |
| class | CyclocopterNoInflow |
| class | CyclocopterUniform1D |
| class | CyclocopterUniform2D |
| class | CyclocopterPolimi |
Functions | |
| static bool | ReadRotorData (DataManager *pDM, MBDynParser &HP, unsigned int uLabel, const StructNode *&pCraft, Mat3x3 &rrot, const StructNode *&pRotor) |
| static bool | ReadUniform (DataManager *pDM, MBDynParser &HP, unsigned int uLabel, bool &bFlagAve, doublereal &dR, doublereal &dL, DriveCaller *&pdW, doublereal &dOmegaFilter, doublereal &dKappa, doublereal &dDeltaT) |
| bool | mbdyn_cyclocopter_set (void) |
| bool mbdyn_cyclocopter_set | ( | void | ) |
Definition at line 1695 of file module-cyclocopter.cc.
References SetUDE().
Referenced by InitUDE().

|
static |
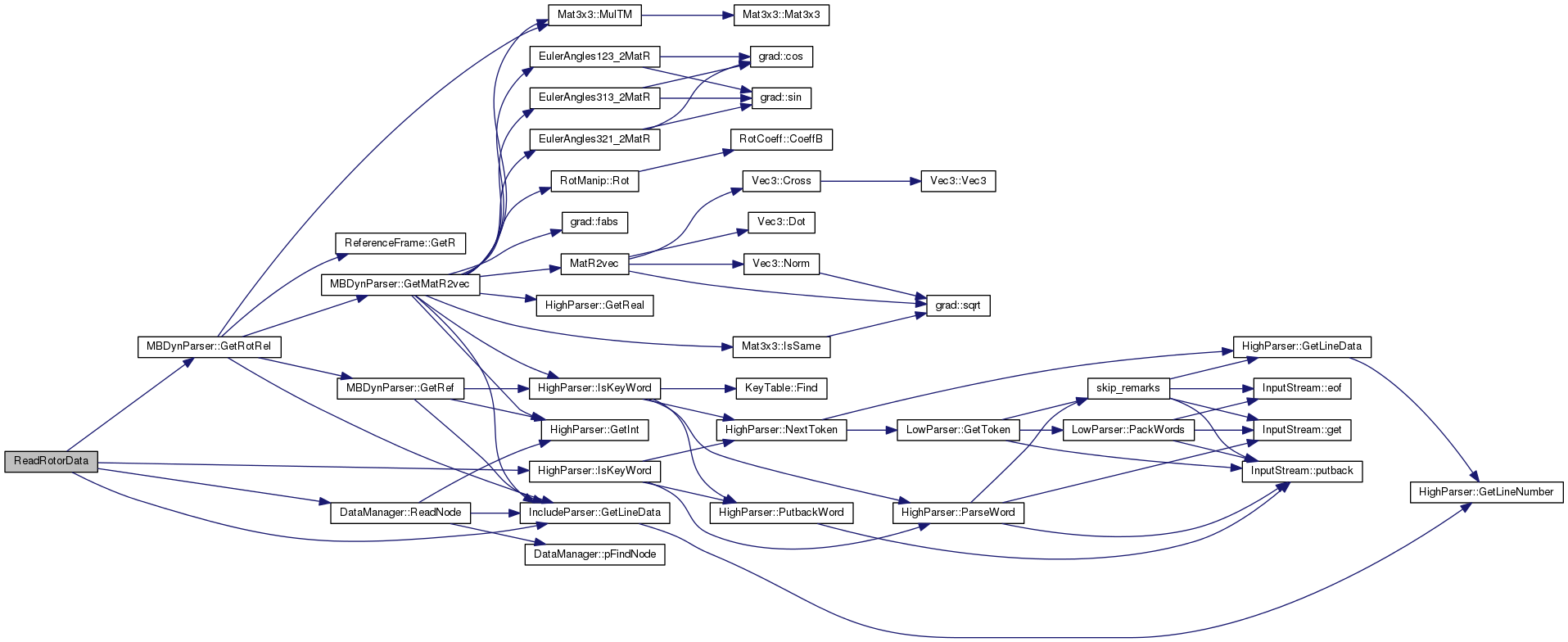
Definition at line 289 of file module-cyclocopter.cc.
References Eye3, IncludeParser::GetLineData(), MBDynParser::GetRotRel(), HighParser::IsKeyWord(), DataManager::ReadNode(), and Node::STRUCTURAL.
Referenced by CyclocopterNoInflow::CyclocopterNoInflow(), CyclocopterPolimi::CyclocopterPolimi(), CyclocopterUniform1D::CyclocopterUniform1D(), and CyclocopterUniform2D::CyclocopterUniform2D().
|
static |
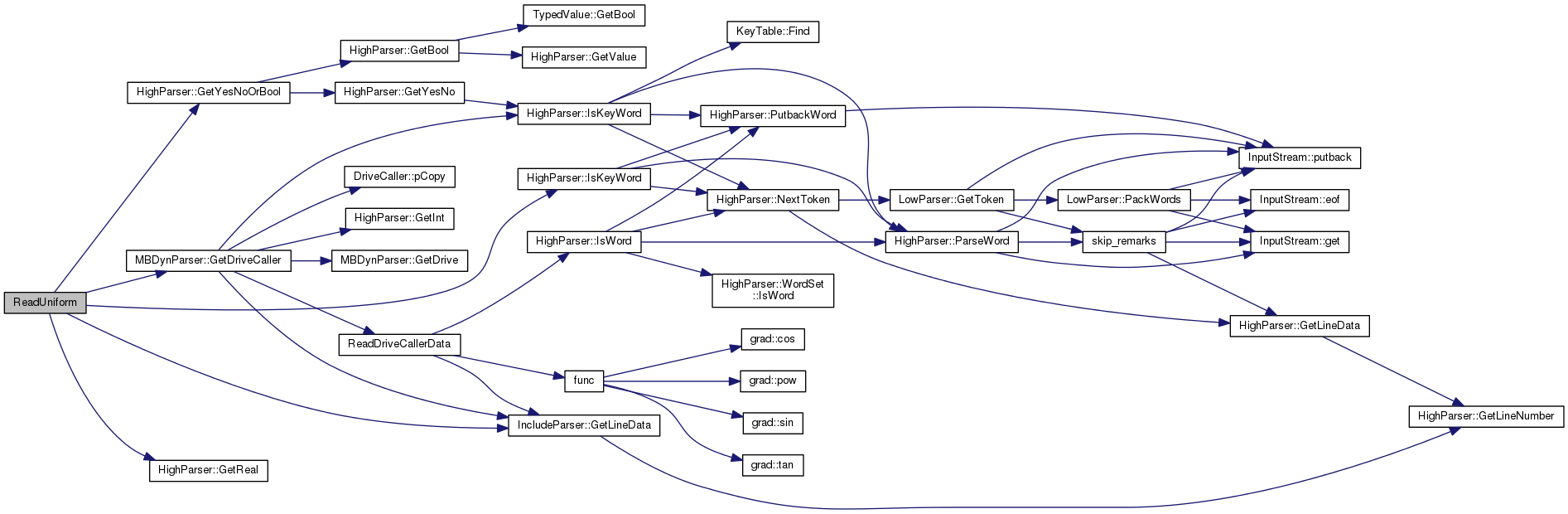
Definition at line 319 of file module-cyclocopter.cc.
References MBDynParser::GetDriveCaller(), IncludeParser::GetLineData(), HighParser::GetReal(), HighParser::GetYesNoOrBool(), HighParser::IsKeyWord(), and SAFENEW.
Referenced by CyclocopterPolimi::CyclocopterPolimi(), CyclocopterUniform1D::CyclocopterUniform1D(), and CyclocopterUniform2D::CyclocopterUniform2D().
 1.8.7
1.8.7 
