|
MBDyn-1.7.3
|
|
MBDyn-1.7.3
|
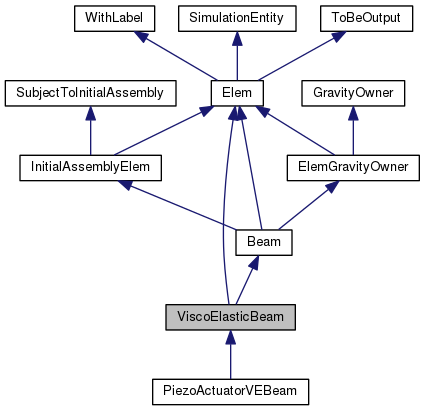
#include <beam.h>
Public Member Functions | |
| ViscoElasticBeam (unsigned int uL, const StructNode *pN1, const StructNode *pN2, const StructNode *pN3, const Vec3 &F1, const Vec3 &F2, const Vec3 &F3, const Mat3x3 &R1, const Mat3x3 &R2, const Mat3x3 &R3, const Mat3x3 &r_I, const Mat3x3 &rII, const ConstitutiveLaw6D *pD_I, const ConstitutiveLaw6D *pDII, OrientationDescription ood, flag fOut) | |
| ViscoElasticBeam (unsigned int uL, const StructNode *pN1, const StructNode *pN2, const StructNode *pN3, const Vec3 &F1, const Vec3 &F2, const Vec3 &F3, const Mat3x3 &R1, const Mat3x3 &R2, const Mat3x3 &R3, const Mat3x3 &r_I, const Mat3x3 &rII, const ConstitutiveLaw6D *pD_I, const ConstitutiveLaw6D *pDII, doublereal dM_I, const Vec3 &s0_I, const Mat3x3 &j0_I, doublereal dMII, const Vec3 &s0II, const Mat3x3 &j0II, OrientationDescription ood, flag fOut) | |
| virtual | ~ViscoElasticBeam (void) |
| virtual Beam::Type | GetBeamType (void) const |
| void | SetValue (DataManager *pDM, VectorHandler &, VectorHandler &, SimulationEntity::Hints *ph=0) |
| virtual void | AfterPredict (VectorHandler &, VectorHandler &) |
| virtual void | AfterConvergence (const VectorHandler &X, const VectorHandler &XP) |
| virtual void | AfterConvergence (const VectorHandler &X, const VectorHandler &XP, const VectorHandler &XPP) |
| virtual doublereal | dGetPrivData (unsigned int i) const |
 Public Member Functions inherited from Elem Public Member Functions inherited from Elem | |
| Elem (unsigned int uL, flag fOut) | |
| virtual | ~Elem (void) |
| virtual unsigned int | iGetNumDof (void) const |
| virtual std::ostream & | DescribeDof (std::ostream &out, const char *prefix="", bool bInitial=false) const |
| virtual void | DescribeDof (std::vector< std::string > &desc, bool bInitial=false, int i=-1) const |
| virtual std::ostream & | DescribeEq (std::ostream &out, const char *prefix="", bool bInitial=false) const |
| virtual void | DescribeEq (std::vector< std::string > &desc, bool bInitial=false, int i=-1) const |
| virtual DofOrder::Order | GetDofType (unsigned int) const |
| void | SetInverseDynamicsFlags (unsigned uIDF) |
| unsigned | GetInverseDynamicsFlags (void) const |
| bool | bIsErgonomy (void) const |
| bool | bIsRightHandSide (void) const |
| virtual VariableSubMatrixHandler & | AssJac (VariableSubMatrixHandler &WorkMat, const VectorHandler &XCurr) |
| virtual int | GetNumConnectedNodes (void) const |
| Public Member Functions inherited from WithLabel | |
| WithLabel (unsigned int uL=0, const std::string &sN="") | |
| virtual | ~WithLabel (void) |
| void | PutLabel (unsigned int uL) |
| void | PutName (const std::string &sN) |
| unsigned int | GetLabel (void) const |
| const std::string & | GetName (void) const |
| Public Member Functions inherited from SimulationEntity | |
| SimulationEntity (void) | |
| virtual | ~SimulationEntity (void) |
| virtual bool | bIsValidIndex (unsigned int i) const |
| virtual DofOrder::Order | GetEqType (unsigned int i) const |
| virtual Hint * | ParseHint (DataManager *pDM, const char *s) const |
| virtual void | BeforePredict (VectorHandler &, VectorHandler &, VectorHandler &, VectorHandler &) const |
| virtual void | Update (const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | DerivativesUpdate (const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | Update (const VectorHandler &XCurr, InverseDynamics::Order iOrder) |
| virtual std::ostream & | OutputAppend (std::ostream &out) const |
| virtual void | ReadInitialState (MBDynParser &HP) |
| Public Member Functions inherited from ToBeOutput | |
| ToBeOutput (flag fOut=fDefaultOut) | |
| virtual | ~ToBeOutput (void) |
| virtual void | Output (OutputHandler &OH, const VectorHandler &X, const VectorHandler &XP) const |
| virtual flag | fToBeOutput (void) const |
| virtual bool | bToBeOutput (void) const |
| virtual void | SetOutputFlag (flag f=flag(1)) |
| Public Member Functions inherited from Beam | |
| Beam (unsigned int uL, const StructNode *pN1, const StructNode *pN2, const StructNode *pN3, const Vec3 &F1, const Vec3 &F2, const Vec3 &F3, const Mat3x3 &R1, const Mat3x3 &R2, const Mat3x3 &R3, const Mat3x3 &r_I, const Mat3x3 &rII, const ConstitutiveLaw6D *pD_I, const ConstitutiveLaw6D *pDII, OrientationDescription ood, flag fOut) | |
| Beam (unsigned int uL, const StructNode *pN1, const StructNode *pN2, const StructNode *pN3, const Vec3 &F1, const Vec3 &F2, const Vec3 &F3, const Mat3x3 &R1, const Mat3x3 &R2, const Mat3x3 &R3, const Mat3x3 &r_I, const Mat3x3 &rII, const ConstitutiveLaw6D *pD_I, const ConstitutiveLaw6D *pDII, doublereal dM_I, const Vec3 &s0_I, const Mat3x3 &j0_I, doublereal dMII, const Vec3 &s0II, const Mat3x3 &j0II, OrientationDescription ood, flag fOut) | |
| virtual | ~Beam (void) |
| virtual Elem::Type | GetElemType (void) const |
| virtual std::ostream & | Restart (std::ostream &out) const |
| virtual void | WorkSpaceDim (integer *piNumRows, integer *piNumCols) const |
| virtual SubVectorHandler & | AssRes (SubVectorHandler &WorkVec, doublereal dCoef, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual SubVectorHandler & | AssRes (SubVectorHandler &WorkVec, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr, const VectorHandler &XPrimePrimeCurr, InverseDynamics::Order iOrder=InverseDynamics::INVERSE_DYNAMICS) |
| virtual bool | bInverseDynamics (void) const |
| virtual VariableSubMatrixHandler & | AssJac (VariableSubMatrixHandler &WorkMat, doublereal dCoef, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| void | AssMats (VariableSubMatrixHandler &WorkMatA, VariableSubMatrixHandler &WorkMatB, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | OutputPrepare (OutputHandler &OH) |
| virtual void | Output (OutputHandler &OH) const |
| virtual unsigned int | iGetInitialNumDof (void) const |
| virtual void | InitialWorkSpaceDim (integer *piNumRows, integer *piNumCols) const |
| virtual void | SetInitialValue (VectorHandler &) |
| virtual VariableSubMatrixHandler & | InitialAssJac (VariableSubMatrixHandler &WorkMat, const VectorHandler &XCurr) |
| virtual SubVectorHandler & | InitialAssRes (SubVectorHandler &WorkVec, const VectorHandler &XCurr) |
| virtual unsigned int | iGetNumPrivData (void) const |
| virtual unsigned int | iGetPrivDataIdx (const char *s) const |
| virtual const StructNode * | pGetNode (unsigned int i) const |
| virtual void | GetConnectedNodes (std::vector< const Node * > &connectedNodes) const |
| Public Member Functions inherited from ElemGravityOwner | |
| ElemGravityOwner (unsigned int uL, flag fOut) | |
| virtual | ~ElemGravityOwner (void) |
| virtual doublereal | dGetM (void) const |
| Vec3 | GetS (void) const |
| Mat3x3 | GetJ (void) const |
| Vec3 | GetB (void) const |
| Vec3 | GetG (void) const |
| Public Member Functions inherited from GravityOwner | |
| GravityOwner (void) | |
| virtual | ~GravityOwner (void) |
| void | PutGravity (const Gravity *pG) |
| virtual bool | bGetGravity (const Vec3 &X, Vec3 &Acc) const |
| Public Member Functions inherited from InitialAssemblyElem | |
| InitialAssemblyElem (unsigned int uL, flag fOut) | |
| virtual | ~InitialAssemblyElem (void) |
| Public Member Functions inherited from SubjectToInitialAssembly | |
| SubjectToInitialAssembly (void) | |
| virtual | ~SubjectToInitialAssembly (void) |
Protected Member Functions | |
| virtual void | AssStiffnessMat (FullSubMatrixHandler &WMA, FullSubMatrixHandler &WMB, doublereal dCoef, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | AssStiffnessVec (SubVectorHandler &WorkVec, doublereal dCoef, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| void | Init (void) |
| Protected Member Functions inherited from Beam | |
| Vec3 | InterpDeriv (const Vec3 &v1, const Vec3 &v2, const Vec3 &v3, enum Section Sec) |
| virtual void | AddInternalForces (Vec6 &, unsigned int) |
| virtual void | AssInertiaMat (FullSubMatrixHandler &, FullSubMatrixHandler &, doublereal, const VectorHandler &, const VectorHandler &) |
| virtual void | AssInertiaVec (SubVectorHandler &, doublereal, const VectorHandler &, const VectorHandler &) |
| virtual void | DsDxi (void) |
| virtual void | Omega0 (void) |
| virtual std::ostream & | Restart_ (std::ostream &out) const |
| void | Init (void) |
| Protected Member Functions inherited from ElemGravityOwner | |
| virtual Vec3 | GetS_int (void) const |
| virtual Mat3x3 | GetJ_int (void) const |
| virtual Vec3 | GetB_int (void) const |
| virtual Vec3 | GetG_int (void) const |
Additional Inherited Members | |
| Public Types inherited from Elem | |
| enum | Type { UNKNOWN = -1, AIRPROPERTIES = 0, INDUCEDVELOCITY, AUTOMATICSTRUCTURAL, GRAVITY, BODY, JOINT, JOINT_REGULARIZATION, BEAM, PLATE, FORCE, INERTIA, ELECTRICBULK, ELECTRIC, THERMAL, HYDRAULIC, BULK, LOADABLE, DRIVEN, EXTERNAL, AEROMODAL, AERODYNAMIC, GENEL, SOCKETSTREAM_OUTPUT, RTAI_OUTPUT = SOCKETSTREAM_OUTPUT, LASTELEMTYPE } |
| Public Types inherited from SimulationEntity | |
| typedef std::vector< Hint * > | Hints |
| Public Types inherited from ToBeOutput | |
| enum | { OUTPUT = 0x1U, OUTPUT_MASK = 0xFU, OUTPUT_PRIVATE = 0x10U, OUTPUT_PRIVATE_MASK = ~OUTPUT_MASK } |
| Public Types inherited from Beam | |
| enum | Type { UNKNOWN = -1, ELASTIC = 0, VISCOELASTIC, PIEZOELECTRICELASTIC, PIEZOELECTRICVISCOELASTIC, LASTBEAMTYPE } |
| enum | { OUTPUT_NONE = 0x000U, OUTPUT_EP_X = (ToBeOutput::OUTPUT_PRIVATE << 0), OUTPUT_EP_R = (ToBeOutput::OUTPUT_PRIVATE << 1), OUTPUT_EP_CONFIGURATION = (OUTPUT_EP_X | OUTPUT_EP_R), OUTPUT_EP_F = (ToBeOutput::OUTPUT_PRIVATE << 2), OUTPUT_EP_M = (ToBeOutput::OUTPUT_PRIVATE << 3), OUTPUT_EP_FORCES = (OUTPUT_EP_F | OUTPUT_EP_M ), OUTPUT_EP_NU = (ToBeOutput::OUTPUT_PRIVATE << 4), OUTPUT_EP_K = (ToBeOutput::OUTPUT_PRIVATE << 5), OUTPUT_EP_STRAINS = (OUTPUT_EP_NU | OUTPUT_EP_K), OUTPUT_EP_NUP = (ToBeOutput::OUTPUT_PRIVATE << 6), OUTPUT_EP_KP = (ToBeOutput::OUTPUT_PRIVATE << 7), OUTPUT_EP_STRAIN_RATES = (OUTPUT_EP_NUP | OUTPUT_EP_KP), OUTPUT_DEFAULT = (OUTPUT_EP_F | OUTPUT_EP_M), OUTPUT_EP_ALL = (ToBeOutput::OUTPUT_PRIVATE_MASK) } |
| enum | Section { S_I = 0, SII = 1, NUMSEZ = 2 } |
| enum | NodeName { NODE1 = 0, NODE2 = 1, NODE3 = 2, NUMNODES = 3 } |
| enum | Deformations { STRAIN = 0, CURVAT = 1, NUMDEFORM = 2 } |
| Static Protected Member Functions inherited from Beam | |
| static unsigned int | iGetPrivDataIdx_int (const char *s, ConstLawType::Type type) |
| static Vec3 | InterpState (const Vec3 &v1, const Vec3 &v2, const Vec3 &v3, enum Section Sec) |
| Static Protected Attributes inherited from Beam | |
| static const unsigned int | iNumPrivData |
| ViscoElasticBeam::ViscoElasticBeam | ( | unsigned int | uL, |
| const StructNode * | pN1, | ||
| const StructNode * | pN2, | ||
| const StructNode * | pN3, | ||
| const Vec3 & | F1, | ||
| const Vec3 & | F2, | ||
| const Vec3 & | F3, | ||
| const Mat3x3 & | R1, | ||
| const Mat3x3 & | R2, | ||
| const Mat3x3 & | R3, | ||
| const Mat3x3 & | r_I, | ||
| const Mat3x3 & | rII, | ||
| const ConstitutiveLaw6D * | pD_I, | ||
| const ConstitutiveLaw6D * | pDII, | ||
| OrientationDescription | ood, | ||
| flag | fOut | ||
| ) |
Definition at line 1310 of file beam.cc.
References Init().

| ViscoElasticBeam::ViscoElasticBeam | ( | unsigned int | uL, |
| const StructNode * | pN1, | ||
| const StructNode * | pN2, | ||
| const StructNode * | pN3, | ||
| const Vec3 & | F1, | ||
| const Vec3 & | F2, | ||
| const Vec3 & | F3, | ||
| const Mat3x3 & | R1, | ||
| const Mat3x3 & | R2, | ||
| const Mat3x3 & | R3, | ||
| const Mat3x3 & | r_I, | ||
| const Mat3x3 & | rII, | ||
| const ConstitutiveLaw6D * | pD_I, | ||
| const ConstitutiveLaw6D * | pDII, | ||
| doublereal | dM_I, | ||
| const Vec3 & | s0_I, | ||
| const Mat3x3 & | j0_I, | ||
| doublereal | dMII, | ||
| const Vec3 & | s0II, | ||
| const Mat3x3 & | j0II, | ||
| OrientationDescription | ood, | ||
| flag | fOut | ||
| ) |
Definition at line 1335 of file beam.cc.
References Init().

|
inlinevirtual |
|
virtual |
Reimplemented from Beam.
Definition at line 1384 of file beam.cc.
References ConstitutiveLawOwner< T, Tder >::AfterConvergence(), Beam::DefLoc, Beam::DefLocPrev, Beam::DefPrimeLoc, Beam::NUMSEZ, Beam::pD, Beam::R, and Beam::RPrev.
Referenced by AfterConvergence().

|
virtual |
Reimplemented from Beam.
Definition at line 1396 of file beam.cc.
References AfterConvergence().

|
virtual |
Reimplemented from Beam.
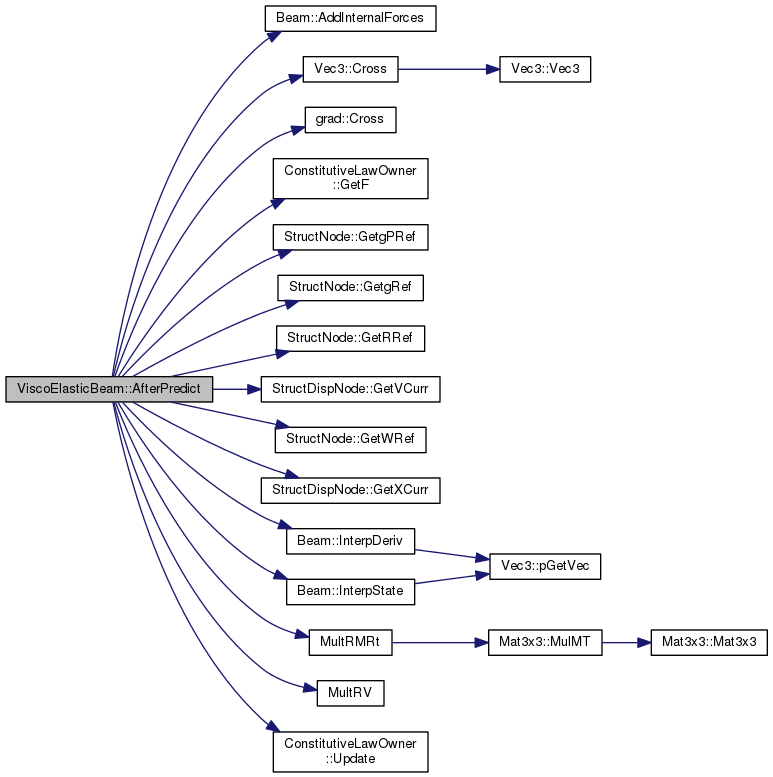
Reimplemented in PiezoActuatorVEBeam.
Definition at line 1657 of file beam.cc.
References Beam::AddInternalForces(), Beam::Az, Beam::AzLoc, Beam::AzRef, Beam::bFirstRes, Vec3::Cross(), grad::Cross(), Beam::DefLoc, Beam::DefLocPrev, Beam::DefLocRef, Beam::DefPrimeLoc, DefPrimeLocRef, Beam::DRef, ERef, Beam::f, Beam::g, ConstitutiveLawOwner< T, Tder >::GetF(), StructNode::GetgPRef(), StructNode::GetgRef(), StructNode::GetRRef(), StructDispNode::GetVCurr(), StructNode::GetWRef(), StructDispNode::GetXCurr(), gPrime, Beam::InterpDeriv(), Beam::InterpState(), Beam::L, Beam::L0, LPrime, LPrimeRef, Beam::LRef, CGR_Rot::MatG, CGR_Rot::MatR, MultRMRt(), MultRV(), Beam::NODE2, Beam::NUMNODES, Beam::NUMSEZ, Beam::Omega, Beam::OmegaRef, Beam::p, Beam::pD, Beam::pNode, Beam::R, Beam::RPrev, Beam::RRef, and ConstitutiveLawOwner< T, Tder >::Update().
Referenced by PiezoActuatorVEBeam::AfterPredict().
|
protectedvirtual |
Reimplemented from Beam.
Reimplemented in PiezoActuatorVEBeam.
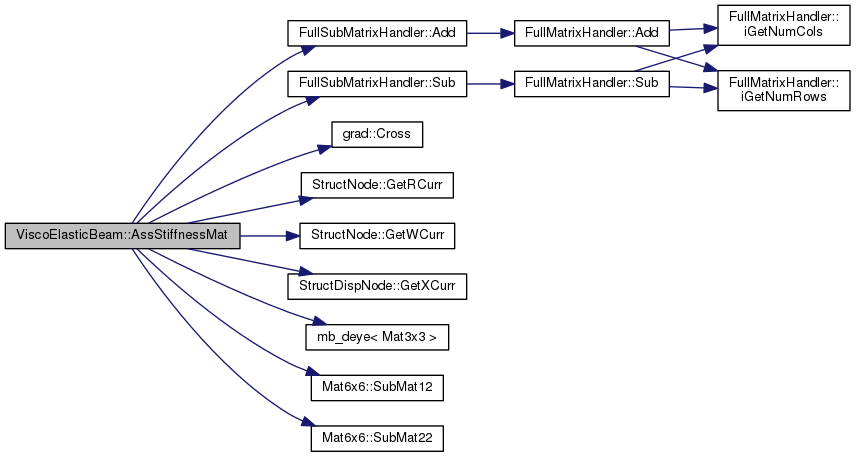
Definition at line 1404 of file beam.cc.
References FullSubMatrixHandler::Add(), Beam::Az, grad::Cross(), DEBUGCOUTFNAME, dN3, dN3P, Beam::DRef, Beam::dsdxi, ERef, Beam::f, StructNode::GetRCurr(), StructNode::GetWCurr(), StructDispNode::GetXCurr(), Beam::L, LPrime, MatCross, MatCrossCross, mb_deye< Mat3x3 >(), Beam::NUMNODES, Beam::NUMSEZ, Beam::Omega, Beam::p, Beam::pNode, FullSubMatrixHandler::Sub(), Mat6x6::SubMat12(), Mat6x6::SubMat22(), and Zero3x3.
Referenced by PiezoActuatorVEBeam::AssStiffnessMat().
|
protectedvirtual |
Reimplemented from Beam.
Reimplemented in PiezoActuatorVEBeam.
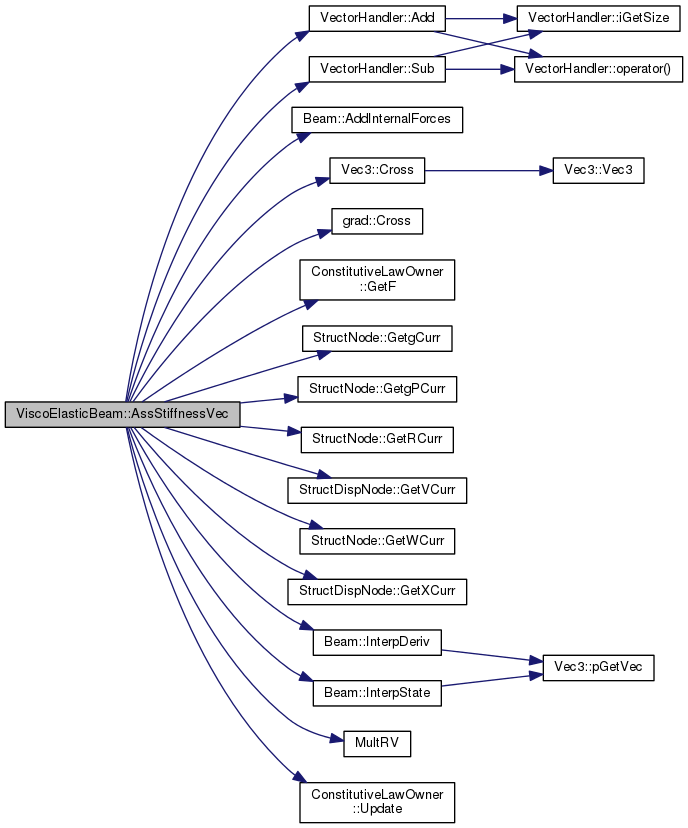
Definition at line 1522 of file beam.cc.
References VectorHandler::Add(), Beam::AddInternalForces(), Beam::Az, Beam::AzLoc, Beam::bFirstRes, Vec3::Cross(), grad::Cross(), DEBUGCOUTFNAME, Beam::DefLoc, Beam::DefLocRef, Beam::DefPrimeLoc, DefPrimeLocRef, Beam::f, Beam::g, ConstitutiveLawOwner< T, Tder >::GetF(), StructNode::GetgCurr(), StructNode::GetgPCurr(), StructNode::GetRCurr(), StructDispNode::GetVCurr(), StructNode::GetWCurr(), StructDispNode::GetXCurr(), gPrime, Beam::InterpDeriv(), Beam::InterpState(), Beam::L, Beam::L0, LPrime, CGR_Rot::MatG, CGR_Rot::MatR, MultRV(), Beam::NODE2, Beam::NUMNODES, Beam::NUMSEZ, Beam::Omega, Beam::OmegaRef, Beam::p, Beam::pD, Beam::pNode, Beam::R, Beam::RRef, Beam::S_I, Beam::SII, VectorHandler::Sub(), and ConstitutiveLawOwner< T, Tder >::Update().
Referenced by PiezoActuatorVEBeam::AssStiffnessVec().
|
virtual |
Reimplemented from Beam.
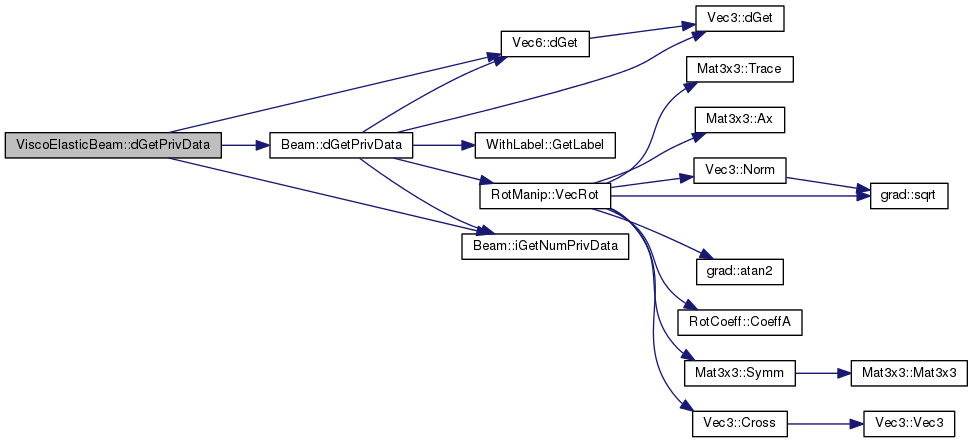
Definition at line 1752 of file beam.cc.
References ASSERT, Beam::DefPrimeLoc, Vec6::dGet(), Beam::dGetPrivData(), Beam::iGetNumPrivData(), and Beam::iNumPrivData.
|
inlinevirtual |
Reimplemented from Beam.
Reimplemented in PiezoActuatorVEBeam.
Definition at line 531 of file beam.h.
References Beam::VISCOELASTIC.
|
protected |
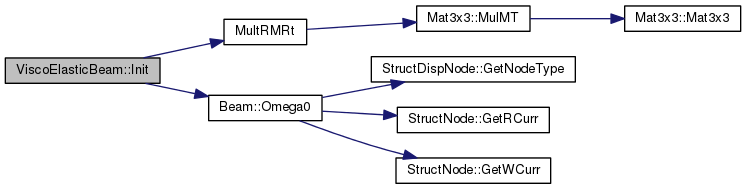
Definition at line 1363 of file beam.cc.
References Beam::DefPrimeLoc, DefPrimeLocRef, ERef, gPrime, LPrime, LPrimeRef, MultRMRt(), Beam::Omega, Beam::Omega0(), Beam::OmegaRef, Beam::pD, Beam::RRef, Beam::S_I, Beam::SII, Zero3, and Zero6.
Referenced by ViscoElasticBeam().
|
virtual |
Reimplemented from Beam.
Reimplemented in PiezoActuatorVEBeam.
Definition at line 1635 of file beam.cc.
References ASSERT, Beam::bFirstRes, Beam::DefPrimeLoc, DefPrimeLocRef, ERef, LPrime, LPrimeRef, MultRMRt(), Beam::NUMSEZ, Beam::Omega, Beam::OmegaRef, Beam::pD, Beam::RRef, and Beam::SetValue().
Referenced by PiezoActuatorVEBeam::SetValue().

Definition at line 461 of file beam.h.
Referenced by AfterPredict(), AssStiffnessVec(), Init(), and SetValue().
Definition at line 463 of file beam.h.
Referenced by AfterPredict(), AssStiffnessMat(), Init(), and SetValue().
Definition at line 454 of file beam.h.
Referenced by AfterPredict(), AssStiffnessVec(), and Init().
Definition at line 453 of file beam.h.
Referenced by AfterPredict(), AssStiffnessMat(), AssStiffnessVec(), Init(), and SetValue().
Definition at line 456 of file beam.h.
Referenced by AfterPredict(), Init(), and SetValue().
 1.8.7
1.8.7 
