|
MBDyn-1.7.3
|
|
MBDyn-1.7.3
|
#include <beam.h>
Classes | |
| class | ErrGeneric |
Public Types | |
| enum | Type { UNKNOWN = -1, ELASTIC = 0, VISCOELASTIC, PIEZOELECTRICELASTIC, PIEZOELECTRICVISCOELASTIC, LASTBEAMTYPE } |
| enum | { OUTPUT_NONE = 0x000U, OUTPUT_EP_X = (ToBeOutput::OUTPUT_PRIVATE << 0), OUTPUT_EP_R = (ToBeOutput::OUTPUT_PRIVATE << 1), OUTPUT_EP_CONFIGURATION = (OUTPUT_EP_X | OUTPUT_EP_R), OUTPUT_EP_F = (ToBeOutput::OUTPUT_PRIVATE << 2), OUTPUT_EP_M = (ToBeOutput::OUTPUT_PRIVATE << 3), OUTPUT_EP_FORCES = (OUTPUT_EP_F | OUTPUT_EP_M ), OUTPUT_EP_NU = (ToBeOutput::OUTPUT_PRIVATE << 4), OUTPUT_EP_K = (ToBeOutput::OUTPUT_PRIVATE << 5), OUTPUT_EP_STRAINS = (OUTPUT_EP_NU | OUTPUT_EP_K), OUTPUT_EP_NUP = (ToBeOutput::OUTPUT_PRIVATE << 6), OUTPUT_EP_KP = (ToBeOutput::OUTPUT_PRIVATE << 7), OUTPUT_EP_STRAIN_RATES = (OUTPUT_EP_NUP | OUTPUT_EP_KP), OUTPUT_DEFAULT = (OUTPUT_EP_F | OUTPUT_EP_M), OUTPUT_EP_ALL = (ToBeOutput::OUTPUT_PRIVATE_MASK) } |
| enum | Section { S_I = 0, SII = 1, NUMSEZ = 2 } |
| enum | NodeName { NODE1 = 0, NODE2 = 1, NODE3 = 2, NUMNODES = 3 } |
| enum | Deformations { STRAIN = 0, CURVAT = 1, NUMDEFORM = 2 } |
 Public Types inherited from Elem Public Types inherited from Elem | |
| enum | Type { UNKNOWN = -1, AIRPROPERTIES = 0, INDUCEDVELOCITY, AUTOMATICSTRUCTURAL, GRAVITY, BODY, JOINT, JOINT_REGULARIZATION, BEAM, PLATE, FORCE, INERTIA, ELECTRICBULK, ELECTRIC, THERMAL, HYDRAULIC, BULK, LOADABLE, DRIVEN, EXTERNAL, AEROMODAL, AERODYNAMIC, GENEL, SOCKETSTREAM_OUTPUT, RTAI_OUTPUT = SOCKETSTREAM_OUTPUT, LASTELEMTYPE } |
| Public Types inherited from SimulationEntity | |
| typedef std::vector< Hint * > | Hints |
| Public Types inherited from ToBeOutput | |
| enum | { OUTPUT = 0x1U, OUTPUT_MASK = 0xFU, OUTPUT_PRIVATE = 0x10U, OUTPUT_PRIVATE_MASK = ~OUTPUT_MASK } |
Public Member Functions | |
| Beam (unsigned int uL, const StructNode *pN1, const StructNode *pN2, const StructNode *pN3, const Vec3 &F1, const Vec3 &F2, const Vec3 &F3, const Mat3x3 &R1, const Mat3x3 &R2, const Mat3x3 &R3, const Mat3x3 &r_I, const Mat3x3 &rII, const ConstitutiveLaw6D *pD_I, const ConstitutiveLaw6D *pDII, OrientationDescription ood, flag fOut) | |
| Beam (unsigned int uL, const StructNode *pN1, const StructNode *pN2, const StructNode *pN3, const Vec3 &F1, const Vec3 &F2, const Vec3 &F3, const Mat3x3 &R1, const Mat3x3 &R2, const Mat3x3 &R3, const Mat3x3 &r_I, const Mat3x3 &rII, const ConstitutiveLaw6D *pD_I, const ConstitutiveLaw6D *pDII, doublereal dM_I, const Vec3 &s0_I, const Mat3x3 &j0_I, doublereal dMII, const Vec3 &s0II, const Mat3x3 &j0II, OrientationDescription ood, flag fOut) | |
| virtual | ~Beam (void) |
| virtual Beam::Type | GetBeamType (void) const |
| virtual Elem::Type | GetElemType (void) const |
| virtual std::ostream & | Restart (std::ostream &out) const |
| virtual void | AfterConvergence (const VectorHandler &X, const VectorHandler &XP) |
| virtual void | AfterConvergence (const VectorHandler &X, const VectorHandler &XP, const VectorHandler &XPP) |
| virtual void | WorkSpaceDim (integer *piNumRows, integer *piNumCols) const |
| void | SetValue (DataManager *pDM, VectorHandler &, VectorHandler &, SimulationEntity::Hints *ph=0) |
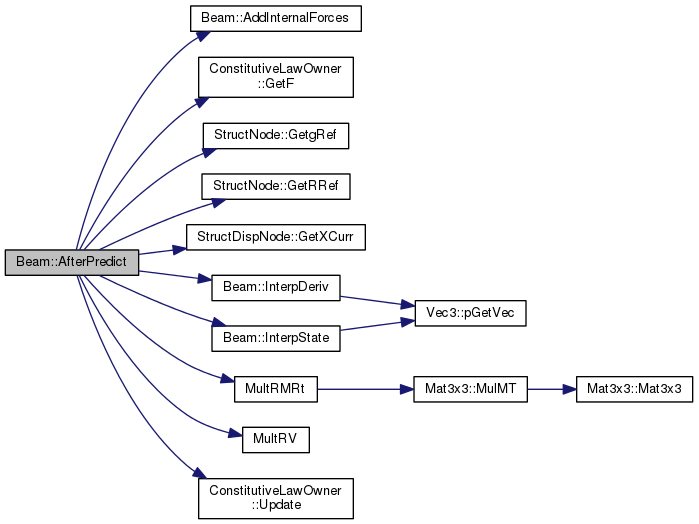
| virtual void | AfterPredict (VectorHandler &, VectorHandler &) |
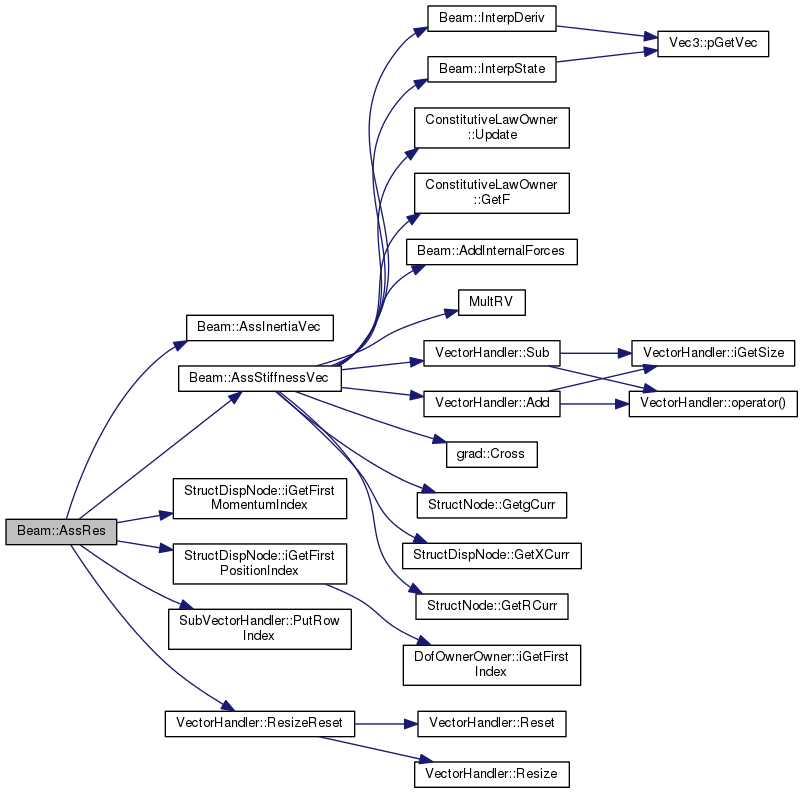
| virtual SubVectorHandler & | AssRes (SubVectorHandler &WorkVec, doublereal dCoef, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual SubVectorHandler & | AssRes (SubVectorHandler &WorkVec, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr, const VectorHandler &XPrimePrimeCurr, InverseDynamics::Order iOrder=InverseDynamics::INVERSE_DYNAMICS) |
| virtual bool | bInverseDynamics (void) const |
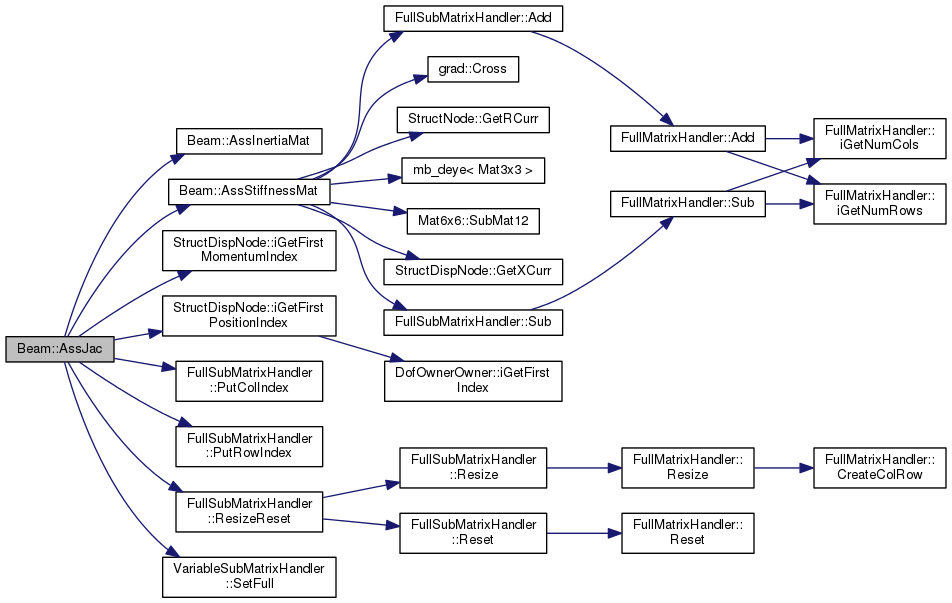
| virtual VariableSubMatrixHandler & | AssJac (VariableSubMatrixHandler &WorkMat, doublereal dCoef, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
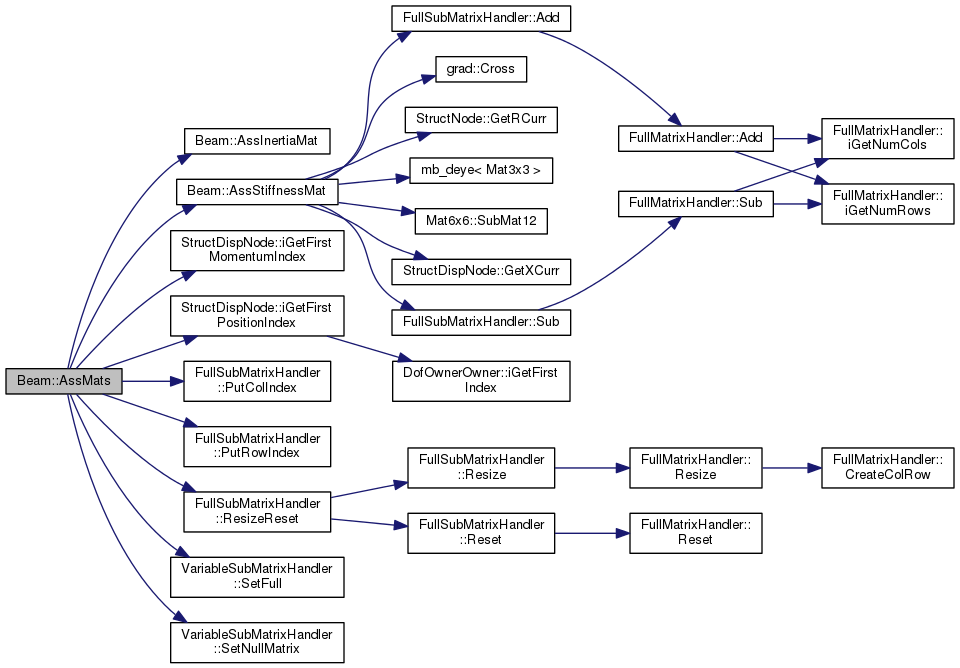
| void | AssMats (VariableSubMatrixHandler &WorkMatA, VariableSubMatrixHandler &WorkMatB, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | OutputPrepare (OutputHandler &OH) |
| virtual void | Output (OutputHandler &OH) const |
| virtual unsigned int | iGetInitialNumDof (void) const |
| virtual void | InitialWorkSpaceDim (integer *piNumRows, integer *piNumCols) const |
| virtual void | SetInitialValue (VectorHandler &) |
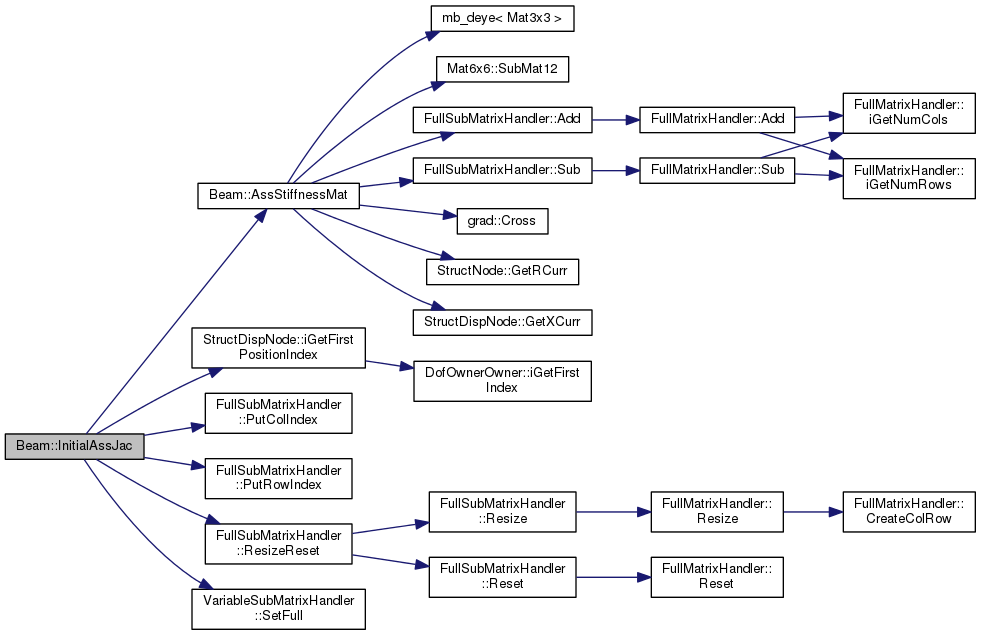
| virtual VariableSubMatrixHandler & | InitialAssJac (VariableSubMatrixHandler &WorkMat, const VectorHandler &XCurr) |
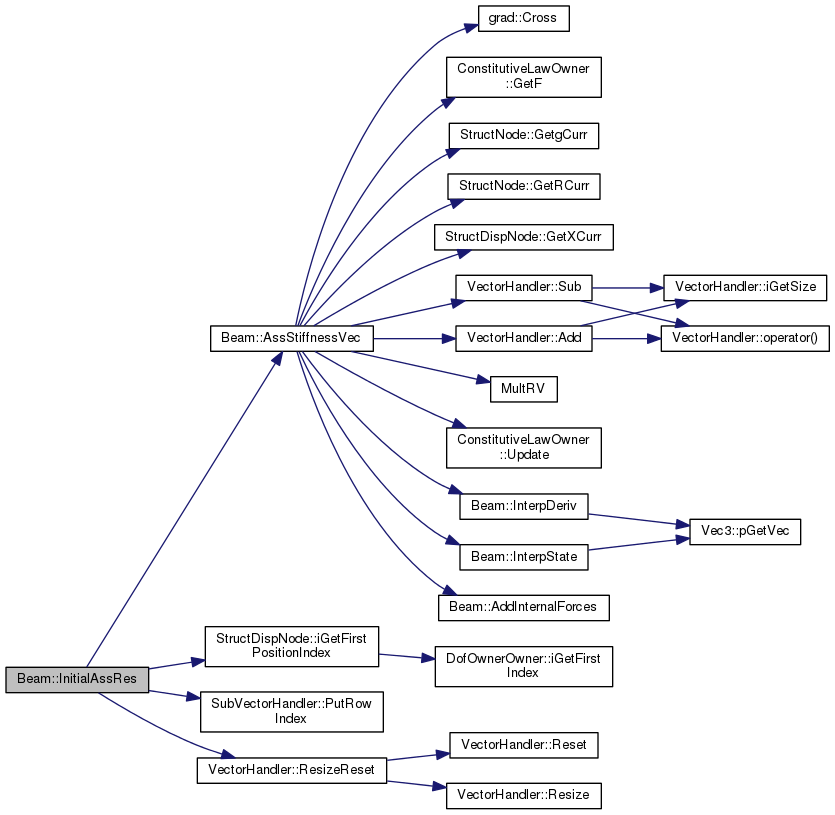
| virtual SubVectorHandler & | InitialAssRes (SubVectorHandler &WorkVec, const VectorHandler &XCurr) |
| virtual unsigned int | iGetNumPrivData (void) const |
| virtual unsigned int | iGetPrivDataIdx (const char *s) const |
| virtual doublereal | dGetPrivData (unsigned int i) const |
| virtual const StructNode * | pGetNode (unsigned int i) const |
| virtual void | GetConnectedNodes (std::vector< const Node * > &connectedNodes) const |
| Public Member Functions inherited from Elem | |
| Elem (unsigned int uL, flag fOut) | |
| virtual | ~Elem (void) |
| virtual unsigned int | iGetNumDof (void) const |
| virtual std::ostream & | DescribeDof (std::ostream &out, const char *prefix="", bool bInitial=false) const |
| virtual void | DescribeDof (std::vector< std::string > &desc, bool bInitial=false, int i=-1) const |
| virtual std::ostream & | DescribeEq (std::ostream &out, const char *prefix="", bool bInitial=false) const |
| virtual void | DescribeEq (std::vector< std::string > &desc, bool bInitial=false, int i=-1) const |
| virtual DofOrder::Order | GetDofType (unsigned int) const |
| void | SetInverseDynamicsFlags (unsigned uIDF) |
| unsigned | GetInverseDynamicsFlags (void) const |
| bool | bIsErgonomy (void) const |
| bool | bIsRightHandSide (void) const |
| virtual VariableSubMatrixHandler & | AssJac (VariableSubMatrixHandler &WorkMat, const VectorHandler &XCurr) |
| virtual int | GetNumConnectedNodes (void) const |
| Public Member Functions inherited from WithLabel | |
| WithLabel (unsigned int uL=0, const std::string &sN="") | |
| virtual | ~WithLabel (void) |
| void | PutLabel (unsigned int uL) |
| void | PutName (const std::string &sN) |
| unsigned int | GetLabel (void) const |
| const std::string & | GetName (void) const |
| Public Member Functions inherited from SimulationEntity | |
| SimulationEntity (void) | |
| virtual | ~SimulationEntity (void) |
| virtual bool | bIsValidIndex (unsigned int i) const |
| virtual DofOrder::Order | GetEqType (unsigned int i) const |
| virtual Hint * | ParseHint (DataManager *pDM, const char *s) const |
| virtual void | BeforePredict (VectorHandler &, VectorHandler &, VectorHandler &, VectorHandler &) const |
| virtual void | Update (const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | DerivativesUpdate (const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | Update (const VectorHandler &XCurr, InverseDynamics::Order iOrder) |
| virtual std::ostream & | OutputAppend (std::ostream &out) const |
| virtual void | ReadInitialState (MBDynParser &HP) |
| Public Member Functions inherited from ToBeOutput | |
| ToBeOutput (flag fOut=fDefaultOut) | |
| virtual | ~ToBeOutput (void) |
| virtual void | Output (OutputHandler &OH, const VectorHandler &X, const VectorHandler &XP) const |
| virtual flag | fToBeOutput (void) const |
| virtual bool | bToBeOutput (void) const |
| virtual void | SetOutputFlag (flag f=flag(1)) |
| Public Member Functions inherited from ElemGravityOwner | |
| ElemGravityOwner (unsigned int uL, flag fOut) | |
| virtual | ~ElemGravityOwner (void) |
| virtual doublereal | dGetM (void) const |
| Vec3 | GetS (void) const |
| Mat3x3 | GetJ (void) const |
| Vec3 | GetB (void) const |
| Vec3 | GetG (void) const |
| Public Member Functions inherited from GravityOwner | |
| GravityOwner (void) | |
| virtual | ~GravityOwner (void) |
| void | PutGravity (const Gravity *pG) |
| virtual bool | bGetGravity (const Vec3 &X, Vec3 &Acc) const |
| Public Member Functions inherited from InitialAssemblyElem | |
| InitialAssemblyElem (unsigned int uL, flag fOut) | |
| virtual | ~InitialAssemblyElem (void) |
| Public Member Functions inherited from SubjectToInitialAssembly | |
| SubjectToInitialAssembly (void) | |
| virtual | ~SubjectToInitialAssembly (void) |
Protected Member Functions | |
| Vec3 | InterpDeriv (const Vec3 &v1, const Vec3 &v2, const Vec3 &v3, enum Section Sec) |
| virtual void | AssStiffnessMat (FullSubMatrixHandler &WMA, FullSubMatrixHandler &WMB, doublereal dCoef, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | AssStiffnessVec (SubVectorHandler &WorkVec, doublereal dCoef, const VectorHandler &XCurr, const VectorHandler &XPrimeCurr) |
| virtual void | AddInternalForces (Vec6 &, unsigned int) |
| virtual void | AssInertiaMat (FullSubMatrixHandler &, FullSubMatrixHandler &, doublereal, const VectorHandler &, const VectorHandler &) |
| virtual void | AssInertiaVec (SubVectorHandler &, doublereal, const VectorHandler &, const VectorHandler &) |
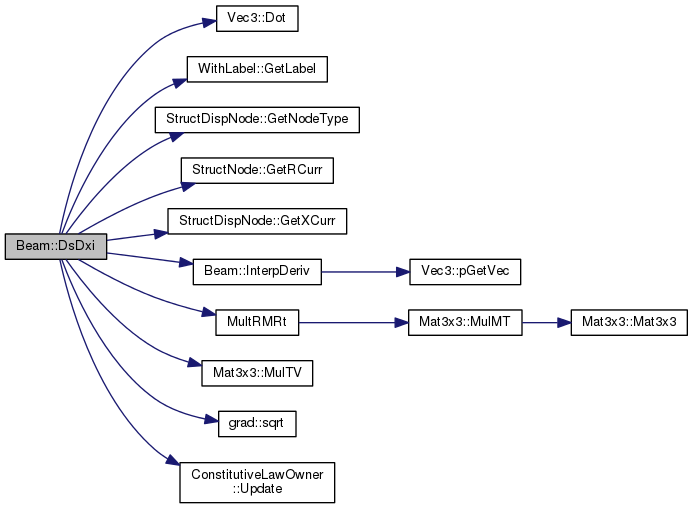
| virtual void | DsDxi (void) |
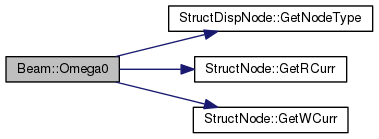
| virtual void | Omega0 (void) |
| virtual std::ostream & | Restart_ (std::ostream &out) const |
| void | Init (void) |
| Protected Member Functions inherited from ElemGravityOwner | |
| virtual Vec3 | GetS_int (void) const |
| virtual Mat3x3 | GetJ_int (void) const |
| virtual Vec3 | GetB_int (void) const |
| virtual Vec3 | GetG_int (void) const |
Static Protected Member Functions | |
| static unsigned int | iGetPrivDataIdx_int (const char *s, ConstLawType::Type type) |
| static Vec3 | InterpState (const Vec3 &v1, const Vec3 &v2, const Vec3 &v3, enum Section Sec) |
Protected Attributes | |
| OrientationDescription | od |
| const StructNode * | pNode [NUMNODES] |
| const Vec3 | f [NUMNODES] |
| Vec3 | fRef [NUMNODES] |
| const Mat3x3 | RNode [NUMNODES] |
| Mat3x3 | R [NUMSEZ] |
| Mat3x3 | RRef [NUMSEZ] |
| Mat3x3 | RPrev [NUMSEZ] |
| ConstitutiveLaw6DOwner * | pD [NUMSEZ] |
| Mat6x6 | DRef [NUMSEZ] |
| const bool | bConsistentInertia |
| const doublereal | dMass_I |
| const Vec3 | S0_I |
| const Mat3x3 | J0_I |
| const doublereal | dMassII |
| const Vec3 | S0II |
| const Mat3x3 | J0II |
| Vec3 | Omega [NUMSEZ] |
| Vec3 | OmegaRef [NUMSEZ] |
| Vec6 | Az [NUMSEZ] |
| Vec6 | AzRef [NUMSEZ] |
| Vec6 | AzLoc [NUMSEZ] |
| Vec6 | DefLoc [NUMSEZ] |
| Vec6 | DefLocRef [NUMSEZ] |
| Vec6 | DefLocPrev [NUMSEZ] |
| Vec6 | DefPrimeLoc [NUMSEZ] |
| Vec3 | p [NUMSEZ] |
| Vec3 | g [NUMSEZ] |
| Vec3 | L0 [NUMSEZ] |
| Vec3 | L [NUMSEZ] |
| Vec3 | LRef [NUMSEZ] |
| doublereal | dsdxi [NUMSEZ] |
| bool | bFirstRes |
| Protected Attributes inherited from WithLabel | |
| unsigned int | uLabel |
| std::string | sName |
| Protected Attributes inherited from ToBeOutput | |
| flag | fOutput |
| Protected Attributes inherited from GravityOwner | |
| Gravity * | pGravity |
Static Protected Attributes | |
| static const unsigned int | iNumPrivData |
Friends | |
| class | AerodynamicBeam |
| class | Beam2 |
| Elem * | ReadBeam (DataManager *pDM, MBDynParser &HP, unsigned int uLabel) |
| anonymous enum |
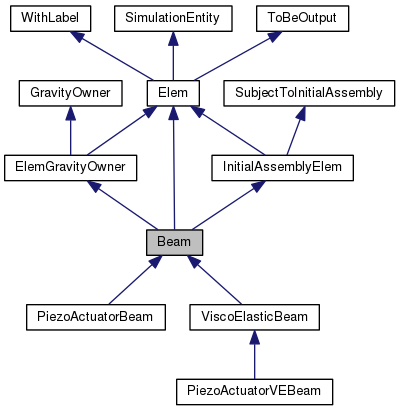
Definition at line 75 of file beam.h.
| enum Beam::Deformations |
| Enumerator | |
|---|---|
| STRAIN | |
| CURVAT | |
| NUMDEFORM | |
| enum Beam::NodeName |
| Enumerator | |
|---|---|
| NODE1 | |
| NODE2 | |
| NODE3 | |
| NUMNODES | |
| enum Beam::Section |
| Enumerator | |
|---|---|
| S_I | |
| SII | |
| NUMSEZ | |
| enum Beam::Type |
| Beam::Beam | ( | unsigned int | uL, |
| const StructNode * | pN1, | ||
| const StructNode * | pN2, | ||
| const StructNode * | pN3, | ||
| const Vec3 & | F1, | ||
| const Vec3 & | F2, | ||
| const Vec3 & | F3, | ||
| const Mat3x3 & | R1, | ||
| const Mat3x3 & | R2, | ||
| const Mat3x3 & | R3, | ||
| const Mat3x3 & | r_I, | ||
| const Mat3x3 & | rII, | ||
| const ConstitutiveLaw6D * | pD_I, | ||
| const ConstitutiveLaw6D * | pDII, | ||
| OrientationDescription | ood, | ||
| flag | fOut | ||
| ) |
Definition at line 64 of file beam.cc.
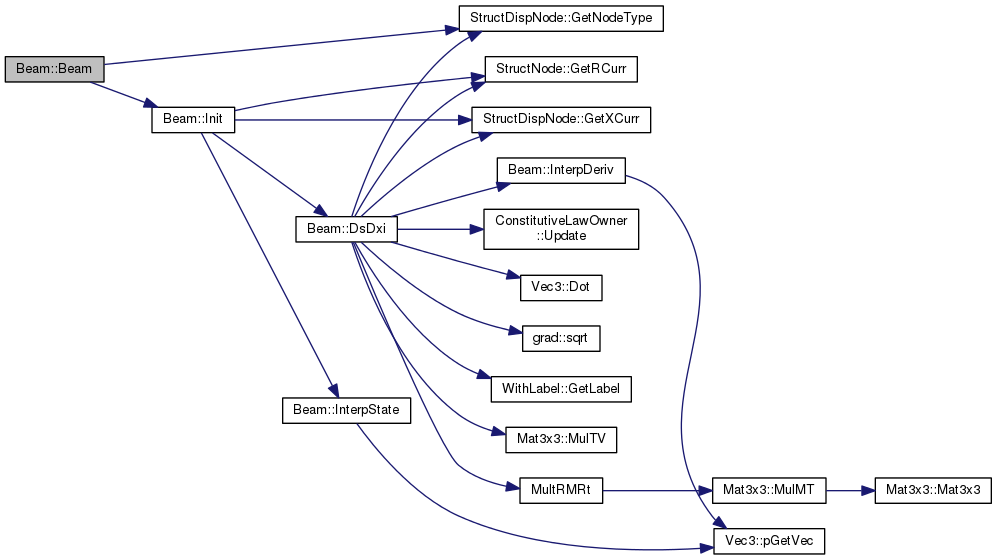
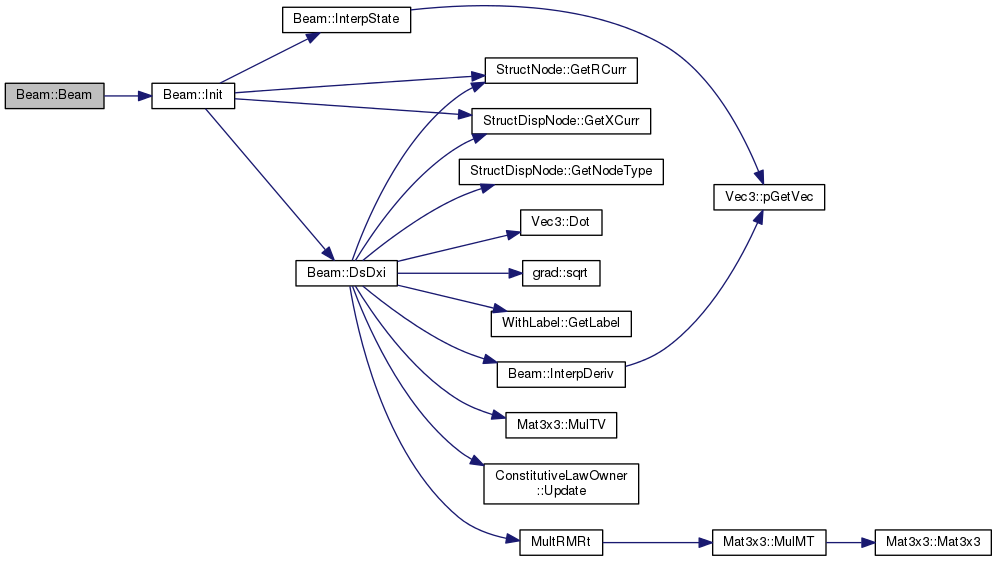
References ASSERT, f, StructDispNode::GetNodeType(), Init(), NODE1, NODE2, NODE3, pD, pNode, R, RNode, RRef, S_I, SAFENEWWITHCONSTRUCTOR, SII, and Node::STRUCTURAL.
| Beam::Beam | ( | unsigned int | uL, |
| const StructNode * | pN1, | ||
| const StructNode * | pN2, | ||
| const StructNode * | pN3, | ||
| const Vec3 & | F1, | ||
| const Vec3 & | F2, | ||
| const Vec3 & | F3, | ||
| const Mat3x3 & | R1, | ||
| const Mat3x3 & | R2, | ||
| const Mat3x3 & | R3, | ||
| const Mat3x3 & | r_I, | ||
| const Mat3x3 & | rII, | ||
| const ConstitutiveLaw6D * | pD_I, | ||
| const ConstitutiveLaw6D * | pDII, | ||
| doublereal | dM_I, | ||
| const Vec3 & | s0_I, | ||
| const Mat3x3 & | j0_I, | ||
| doublereal | dMII, | ||
| const Vec3 & | s0II, | ||
| const Mat3x3 & | j0II, | ||
| OrientationDescription | ood, | ||
| flag | fOut | ||
| ) |
Definition at line 129 of file beam.cc.
References f, Init(), NODE1, NODE2, NODE3, pD, pNode, R, RNode, RPrev, RRef, S_I, SAFENEWWITHCONSTRUCTOR, and SII.
|
virtual |
Definition at line 236 of file beam.cc.
References ASSERT, pD, S_I, SAFEDELETE, and SII.
Reimplemented in PiezoActuatorVEBeam, and PiezoActuatorBeam.
Definition at line 227 of file beam.h.
References NO_OP.
Referenced by AfterPredict(), ViscoElasticBeam::AfterPredict(), AssStiffnessVec(), and ViscoElasticBeam::AssStiffnessVec().
|
virtual |
Reimplemented from SimulationEntity.
Reimplemented in ViscoElasticBeam.
Definition at line 595 of file beam.cc.
References ConstitutiveLawOwner< T, Tder >::AfterConvergence(), DefLoc, DefLocPrev, NUMSEZ, pD, R, and RPrev.
Referenced by AfterConvergence().

|
virtual |
Reimplemented from SimulationEntity.
Reimplemented in ViscoElasticBeam.
Definition at line 606 of file beam.cc.
References AfterConvergence().

|
virtual |
Reimplemented from SimulationEntity.
Reimplemented in ViscoElasticBeam, PiezoActuatorVEBeam, and PiezoActuatorBeam.
Definition at line 988 of file beam.cc.
References AddInternalForces(), Az, AzLoc, AzRef, bFirstRes, DefLoc, DefLocPrev, DefLocRef, DRef, f, g, ConstitutiveLawOwner< T, Tder >::GetF(), StructNode::GetgRef(), StructNode::GetRRef(), StructDispNode::GetXCurr(), InterpDeriv(), InterpState(), L, L0, LRef, CGR_Rot::MatG, CGR_Rot::MatR, MultRMRt(), MultRV(), NODE2, NUMNODES, NUMSEZ, p, pD, pNode, R, RPrev, RRef, and ConstitutiveLawOwner< T, Tder >::Update().
Referenced by PiezoActuatorBeam::AfterPredict().
|
inlineprotectedvirtual |
Definition at line 232 of file beam.h.
References NO_OP.
Referenced by PiezoActuatorBeam::AssJac(), PiezoActuatorVEBeam::AssJac(), AssJac(), and AssMats().
|
inlineprotectedvirtual |
|
virtual |
Implements Elem.
Reimplemented in PiezoActuatorVEBeam, and PiezoActuatorBeam.
Definition at line 772 of file beam.cc.
References AssInertiaMat(), AssStiffnessMat(), bConsistentInertia, DEBUGCOUTFNAME, StructDispNode::iGetFirstMomentumIndex(), StructDispNode::iGetFirstPositionIndex(), NODE1, NODE2, NODE3, pNode, FullSubMatrixHandler::PutColIndex(), FullSubMatrixHandler::PutRowIndex(), FullSubMatrixHandler::ResizeReset(), and VariableSubMatrixHandler::SetFull().
|
virtual |
Reimplemented from Elem.
Definition at line 822 of file beam.cc.
References AssInertiaMat(), AssStiffnessMat(), bConsistentInertia, DEBUGCOUTFNAME, StructDispNode::iGetFirstMomentumIndex(), StructDispNode::iGetFirstPositionIndex(), NODE1, NODE2, NODE3, pNode, FullSubMatrixHandler::PutColIndex(), FullSubMatrixHandler::PutRowIndex(), FullSubMatrixHandler::ResizeReset(), VariableSubMatrixHandler::SetFull(), and VariableSubMatrixHandler::SetNullMatrix().
|
virtual |
Implements Elem.
Definition at line 886 of file beam.cc.
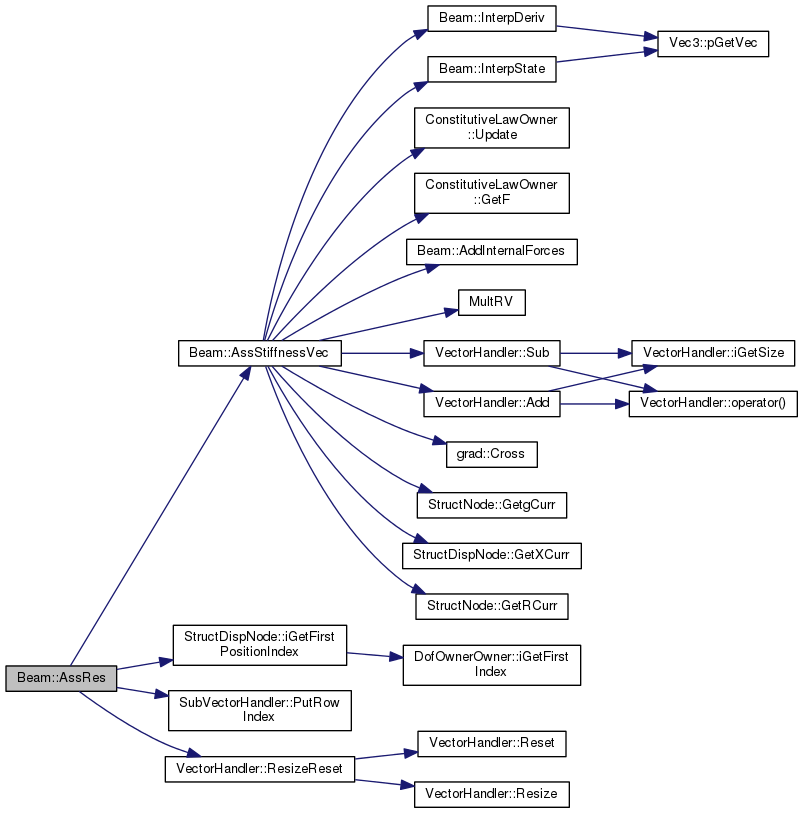
References AssInertiaVec(), AssStiffnessVec(), bConsistentInertia, DEBUGCOUTFNAME, StructDispNode::iGetFirstMomentumIndex(), StructDispNode::iGetFirstPositionIndex(), NODE1, NODE2, NODE3, pNode, SubVectorHandler::PutRowIndex(), and VectorHandler::ResizeReset().
|
virtual |
Reimplemented from Elem.
Definition at line 931 of file beam.cc.
References AssStiffnessVec(), DEBUGCOUTFNAME, StructDispNode::iGetFirstPositionIndex(), NODE1, NODE2, NODE3, pNode, SubVectorHandler::PutRowIndex(), and VectorHandler::ResizeReset().
|
protectedvirtual |
Reimplemented in ViscoElasticBeam, PiezoActuatorVEBeam, and PiezoActuatorBeam.
Definition at line 613 of file beam.cc.
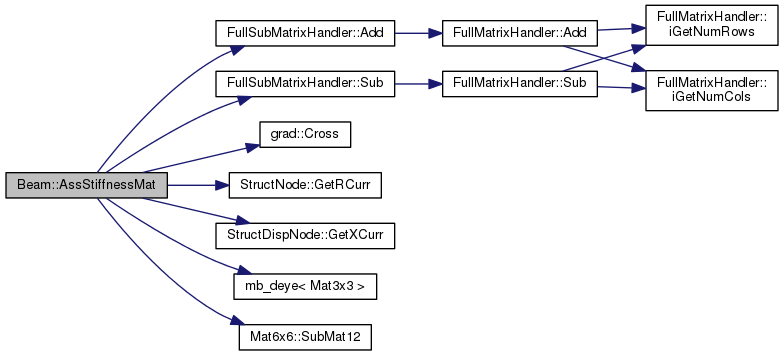
References FullSubMatrixHandler::Add(), Az, grad::Cross(), DEBUGCOUTFNAME, dN3, dN3P, DRef, dsdxi, f, StructNode::GetRCurr(), StructDispNode::GetXCurr(), L, MatCross, MatCrossCross, mb_deye< Mat3x3 >(), NUMNODES, NUMSEZ, p, pNode, FullSubMatrixHandler::Sub(), Mat6x6::SubMat12(), and Zero3x3.
Referenced by AssJac(), AssMats(), PiezoActuatorBeam::AssStiffnessMat(), and InitialAssJac().
|
protectedvirtual |
Reimplemented in ViscoElasticBeam, PiezoActuatorVEBeam, and PiezoActuatorBeam.
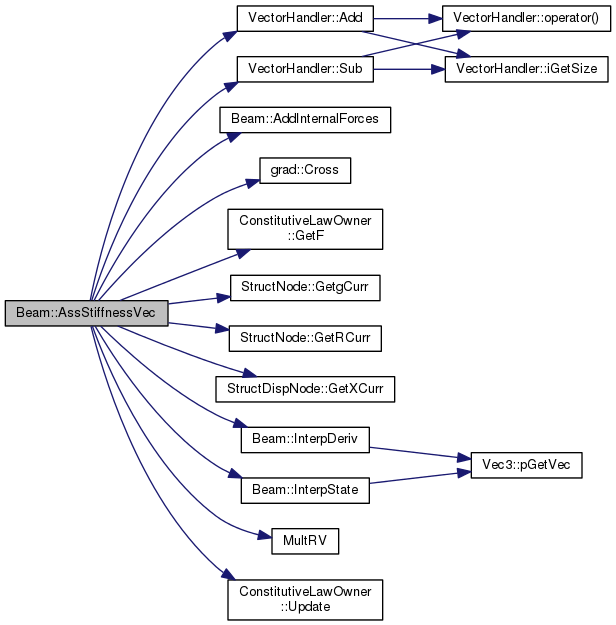
Definition at line 697 of file beam.cc.
References VectorHandler::Add(), AddInternalForces(), Az, AzLoc, bFirstRes, grad::Cross(), DEBUGCOUTFNAME, DefLoc, DefLocRef, f, g, ConstitutiveLawOwner< T, Tder >::GetF(), StructNode::GetgCurr(), StructNode::GetRCurr(), StructDispNode::GetXCurr(), InterpDeriv(), InterpState(), L, L0, CGR_Rot::MatG, CGR_Rot::MatR, MultRV(), NODE2, NUMNODES, NUMSEZ, p, pD, pNode, R, RRef, S_I, SII, VectorHandler::Sub(), and ConstitutiveLawOwner< T, Tder >::Update().
Referenced by AssRes(), PiezoActuatorBeam::AssStiffnessVec(), and InitialAssRes().
|
virtual |
|
virtual |
Reimplemented from SimulationEntity.
Reimplemented in ViscoElasticBeam.
Definition at line 381 of file beam.cc.
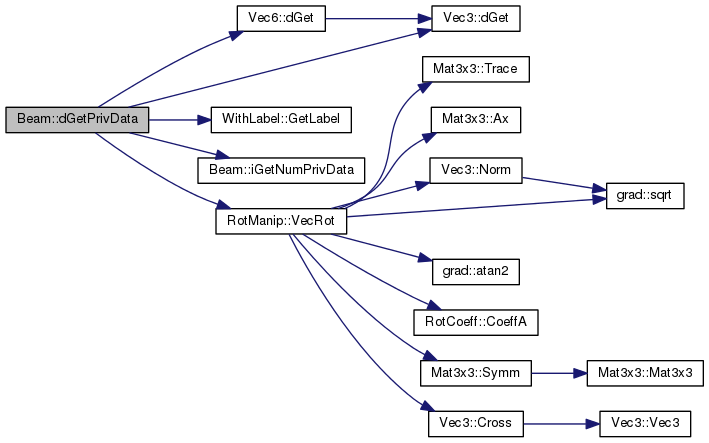
References ASSERT, AzLoc, DefLoc, Vec6::dGet(), Vec3::dGet(), WithLabel::GetLabel(), iGetNumPrivData(), iNumPrivData, MBDYN_EXCEPT_ARGS, Omega, p, R, and RotManip::VecRot().
Referenced by ViscoElasticBeam::dGetPrivData().
|
protectedvirtual |
Definition at line 466 of file beam.cc.
References ASSERT, Vec3::Dot(), DRef, dsdxi, f, WithLabel::GetLabel(), StructDispNode::GetNodeType(), StructNode::GetRCurr(), StructDispNode::GetXCurr(), InterpDeriv(), L0, MBDYN_EXCEPT_ARGS, MultRMRt(), Mat3x3::MulTV(), NODE1, NODE2, NODE3, NUMNODES, NUMSEZ, pD, pNode, R, grad::sqrt(), Node::STRUCTURAL, ConstitutiveLawOwner< T, Tder >::Update(), and Zero6.
Referenced by Init().
|
inlinevirtual |
Reimplemented in ViscoElasticBeam, PiezoActuatorVEBeam, and PiezoActuatorBeam.
Definition at line 292 of file beam.h.
References ELASTIC.
Referenced by OutputPrepare().
|
inlinevirtual |
Reimplemented from Elem.
Reimplemented in PiezoActuatorVEBeam, and PiezoActuatorBeam.
Definition at line 434 of file beam.h.
References NUMNODES, and pNode.
Referenced by PiezoActuatorBeam::GetConnectedNodes().
|
inlinevirtual |
Implements Elem.
Definition at line 297 of file beam.h.
References Elem::BEAM.
Referenced by AerodynamicBeam::AerodynamicBeam().
|
inlinevirtual |
Implements SubjectToInitialAssembly.
|
virtual |
Reimplemented from SimulationEntity.
Definition at line 263 of file beam.cc.
References iNumPrivData.
Referenced by dGetPrivData(), and ViscoElasticBeam::dGetPrivData().
|
virtual |
Reimplemented from SimulationEntity.
Definition at line 346 of file beam.cc.
References ASSERT, ConstLawType::ELASTIC, iGetPrivDataIdx_int(), iNumPrivData, STRLENOF, and ConstLawType::VISCOUS.

|
staticprotected |
Definition at line 269 of file beam.cc.
References ASSERT, STRLENOF, and ConstLawType::VISCOUS.
Referenced by Beam2::iGetPrivDataIdx(), and iGetPrivDataIdx().
|
protected |
Definition at line 191 of file beam.cc.
References Az, AzLoc, AzRef, DefLoc, DefLocPrev, DefLocRef, DsDxi(), f, g, StructNode::GetRCurr(), StructDispNode::GetXCurr(), InterpState(), L, L0, LRef, NODE1, NODE2, NODE3, NUMNODES, NUMSEZ, Omega, p, pNode, Zero3, and Zero6.
Referenced by Beam().

|
virtual |
Implements SubjectToInitialAssembly.
Reimplemented in PiezoActuatorVEBeam, and PiezoActuatorBeam.
Definition at line 1236 of file beam.cc.
References AssStiffnessMat(), DEBUGCOUTFNAME, StructDispNode::iGetFirstPositionIndex(), NODE1, NODE2, NODE3, pNode, FullSubMatrixHandler::PutColIndex(), FullSubMatrixHandler::PutRowIndex(), FullSubMatrixHandler::ResizeReset(), and VariableSubMatrixHandler::SetFull().
Referenced by PiezoActuatorBeam::InitialAssJac(), and PiezoActuatorVEBeam::InitialAssJac().
|
virtual |
Implements SubjectToInitialAssembly.
Reimplemented in PiezoActuatorVEBeam, and PiezoActuatorBeam.
Definition at line 1265 of file beam.cc.
References AssStiffnessVec(), DEBUGCOUTFNAME, StructDispNode::iGetFirstPositionIndex(), NODE1, NODE2, NODE3, pNode, SubVectorHandler::PutRowIndex(), and VectorHandler::ResizeReset().
Referenced by PiezoActuatorBeam::InitialAssRes(), and PiezoActuatorVEBeam::InitialAssRes().
|
inlinevirtual |
Implements SubjectToInitialAssembly.
|
protected |
Definition at line 446 of file beam.cc.
References dN3P, dsdxi, and Vec3::pGetVec().
Referenced by AfterPredict(), ViscoElasticBeam::AfterPredict(), AssStiffnessVec(), ViscoElasticBeam::AssStiffnessVec(), and DsDxi().

|
staticprotected |
Definition at line 429 of file beam.cc.
References dN3, and Vec3::pGetVec().
Referenced by AfterPredict(), ViscoElasticBeam::AfterPredict(), AssStiffnessVec(), ViscoElasticBeam::AssStiffnessVec(), Init(), and ReadBeam().

|
protectedvirtual |
Definition at line 519 of file beam.cc.
References ASSERT, dN3, StructDispNode::GetNodeType(), StructNode::GetRCurr(), StructNode::GetWCurr(), CGR_Rot::MatG, CGR_Rot::MatGm1, NODE1, NODE2, NODE3, NUMNODES, NUMSEZ, Omega, CGR_Rot::Param, pNode, RNode, and Node::STRUCTURAL.
Referenced by ViscoElasticBeam::Init().
|
virtual |
Reimplemented from ToBeOutput.
Definition at line 1141 of file beam.cc.
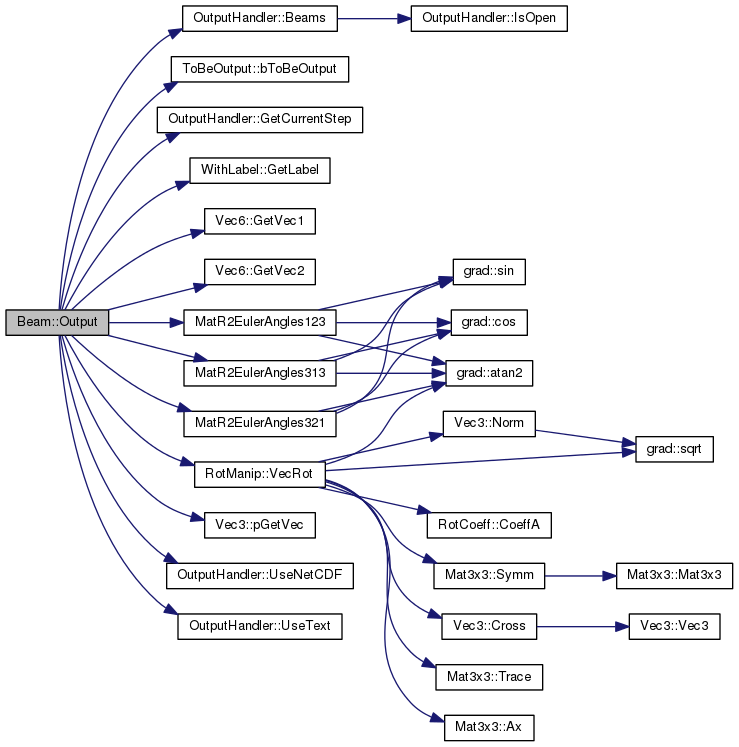
References AzLoc, OutputHandler::BEAMS, OutputHandler::Beams(), ToBeOutput::bToBeOutput(), DefLoc, DefPrimeLoc, dRaDegr, EULER_123, EULER_313, EULER_321, OutputHandler::GetCurrentStep(), WithLabel::GetLabel(), Vec6::GetVec1(), Vec6::GetVec2(), MatR2EulerAngles123(), MatR2EulerAngles313(), MatR2EulerAngles321(), NUMSEZ, od, ORIENTATION_MATRIX, ORIENTATION_VECTOR, p, Vec3::pGetVec(), R, S_I, SII, OutputHandler::UseNetCDF(), OutputHandler::UseText(), and RotManip::VecRot().
|
virtual |
Reimplemented from ToBeOutput.
Definition at line 1047 of file beam.cc.
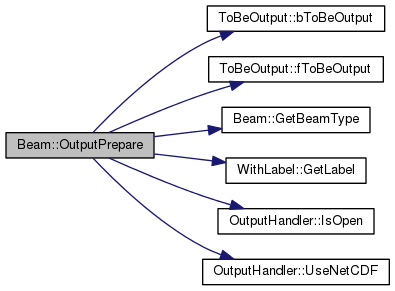
References ASSERT, OutputHandler::BEAMS, ToBeOutput::bToBeOutput(), ELASTIC, ToBeOutput::fToBeOutput(), GetBeamType(), WithLabel::GetLabel(), OutputHandler::IsOpen(), OutputHandler::NETCDF, NUMSEZ, od, OUTPUT_EP_F, OUTPUT_EP_K, OUTPUT_EP_KP, OUTPUT_EP_M, OUTPUT_EP_NU, OUTPUT_EP_NUP, OUTPUT_EP_R, OUTPUT_EP_X, ToBeOutput::OUTPUT_PRIVATE_MASK, PIEZOELECTRICELASTIC, PIEZOELECTRICVISCOELASTIC, OutputHandler::UseNetCDF(), and VISCOELASTIC.
|
virtual |
Definition at line 1290 of file beam.cc.
References ASSERT, MBDYN_EXCEPT_ARGS, and pNode.
Referenced by AerodynamicBeam::AerodynamicBeam(), BeamConn::pGetNode(), and ReadAerodynamicBeam().
|
virtual |
Implements Elem.
Reimplemented in PiezoActuatorVEBeam, and PiezoActuatorBeam.
Definition at line 570 of file beam.cc.
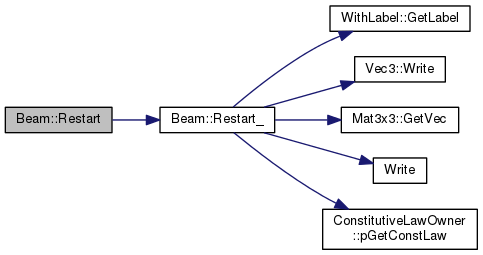
References Restart_().
|
protectedvirtual |
Definition at line 576 of file beam.cc.
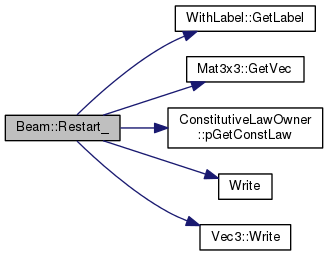
References f, WithLabel::GetLabel(), Mat3x3::GetVec(), NUMNODES, NUMSEZ, pD, ConstitutiveLawOwner< T, Tder >::pGetConstLaw(), pNode, R, Write(), and Vec3::Write().
Referenced by PiezoActuatorBeam::Restart(), PiezoActuatorVEBeam::Restart(), and Restart().
|
inlinevirtual |
|
virtual |
Implements ElemGravityOwner.
Reimplemented in ViscoElasticBeam, PiezoActuatorVEBeam, and PiezoActuatorBeam.
Definition at line 966 of file beam.cc.
References Az, AzRef, bFirstRes, DefLoc, DefLocRef, DRef, L, LRef, MultRMRt(), NUMSEZ, pD, R, and RRef.
Referenced by PiezoActuatorBeam::SetValue(), and ViscoElasticBeam::SetValue().

Implements Elem.
Reimplemented in PiezoActuatorVEBeam, and PiezoActuatorBeam.
Definition at line 317 of file beam.h.
References bConsistentInertia.
|
friend |
|
friend |
Definition at line 1876 of file beam.cc.
Definition at line 177 of file beam.h.
Referenced by AfterPredict(), ViscoElasticBeam::AfterPredict(), AssStiffnessMat(), ViscoElasticBeam::AssStiffnessMat(), AssStiffnessVec(), ViscoElasticBeam::AssStiffnessVec(), Init(), and SetValue().
Definition at line 179 of file beam.h.
Referenced by AfterPredict(), ViscoElasticBeam::AfterPredict(), AssStiffnessVec(), ViscoElasticBeam::AssStiffnessVec(), dGetPrivData(), Init(), and Output().
Definition at line 178 of file beam.h.
Referenced by AfterPredict(), ViscoElasticBeam::AfterPredict(), Init(), and SetValue().
|
protected |
Definition at line 162 of file beam.h.
Referenced by PiezoActuatorBeam::AssJac(), PiezoActuatorVEBeam::AssJac(), AssJac(), AssMats(), AssRes(), PiezoActuatorBeam::WorkSpaceDim(), PiezoActuatorVEBeam::WorkSpaceDim(), and WorkSpaceDim().
|
protected |
Definition at line 197 of file beam.h.
Referenced by AfterPredict(), ViscoElasticBeam::AfterPredict(), PiezoActuatorBeam::AssStiffnessVec(), PiezoActuatorVEBeam::AssStiffnessVec(), AssStiffnessVec(), ViscoElasticBeam::AssStiffnessVec(), SetValue(), and ViscoElasticBeam::SetValue().
Definition at line 180 of file beam.h.
Referenced by AfterConvergence(), ViscoElasticBeam::AfterConvergence(), AfterPredict(), ViscoElasticBeam::AfterPredict(), AssStiffnessVec(), ViscoElasticBeam::AssStiffnessVec(), dGetPrivData(), Init(), Output(), and SetValue().
Definition at line 182 of file beam.h.
Referenced by AfterConvergence(), ViscoElasticBeam::AfterConvergence(), AfterPredict(), ViscoElasticBeam::AfterPredict(), and Init().
Definition at line 181 of file beam.h.
Referenced by AfterPredict(), ViscoElasticBeam::AfterPredict(), AssStiffnessVec(), ViscoElasticBeam::AssStiffnessVec(), Init(), and SetValue().
Definition at line 185 of file beam.h.
Referenced by ViscoElasticBeam::AfterConvergence(), ViscoElasticBeam::AfterPredict(), ViscoElasticBeam::AssStiffnessVec(), ViscoElasticBeam::dGetPrivData(), ViscoElasticBeam::Init(), Output(), and ViscoElasticBeam::SetValue().
|
protected |
|
protected |
Definition at line 159 of file beam.h.
Referenced by AfterPredict(), ViscoElasticBeam::AfterPredict(), AssStiffnessMat(), ViscoElasticBeam::AssStiffnessMat(), DsDxi(), and SetValue().
|
protected |
Definition at line 194 of file beam.h.
Referenced by AssStiffnessMat(), ViscoElasticBeam::AssStiffnessMat(), DsDxi(), and InterpDeriv().
Definition at line 145 of file beam.h.
Referenced by AfterPredict(), ViscoElasticBeam::AfterPredict(), AssStiffnessMat(), ViscoElasticBeam::AssStiffnessMat(), AssStiffnessVec(), ViscoElasticBeam::AssStiffnessVec(), Beam(), DsDxi(), Init(), and Restart_().
Definition at line 188 of file beam.h.
Referenced by AfterPredict(), ViscoElasticBeam::AfterPredict(), AssStiffnessVec(), ViscoElasticBeam::AssStiffnessVec(), and Init().
|
staticprotected |
Definition at line 100 of file beam.h.
Referenced by dGetPrivData(), ViscoElasticBeam::dGetPrivData(), Beam2::iGetNumPrivData(), iGetNumPrivData(), and iGetPrivDataIdx().
Definition at line 190 of file beam.h.
Referenced by AfterPredict(), ViscoElasticBeam::AfterPredict(), AssStiffnessMat(), ViscoElasticBeam::AssStiffnessMat(), AssStiffnessVec(), ViscoElasticBeam::AssStiffnessVec(), Init(), and SetValue().
Definition at line 189 of file beam.h.
Referenced by AfterPredict(), ViscoElasticBeam::AfterPredict(), AssStiffnessVec(), ViscoElasticBeam::AssStiffnessVec(), DsDxi(), and Init().
Definition at line 192 of file beam.h.
Referenced by AfterPredict(), ViscoElasticBeam::AfterPredict(), Init(), and SetValue().
|
protected |
Definition at line 116 of file beam.h.
Referenced by Output(), and OutputPrepare().
Definition at line 173 of file beam.h.
Referenced by ViscoElasticBeam::AfterPredict(), ViscoElasticBeam::AssStiffnessMat(), ViscoElasticBeam::AssStiffnessVec(), dGetPrivData(), Init(), ViscoElasticBeam::Init(), Omega0(), and ViscoElasticBeam::SetValue().
Definition at line 174 of file beam.h.
Referenced by ViscoElasticBeam::AfterPredict(), ViscoElasticBeam::AssStiffnessVec(), ViscoElasticBeam::Init(), and ViscoElasticBeam::SetValue().
Definition at line 187 of file beam.h.
Referenced by AfterPredict(), ViscoElasticBeam::AfterPredict(), PiezoActuatorBeam::AssStiffnessMat(), PiezoActuatorVEBeam::AssStiffnessMat(), AssStiffnessMat(), ViscoElasticBeam::AssStiffnessMat(), AssStiffnessVec(), ViscoElasticBeam::AssStiffnessVec(), dGetPrivData(), Init(), and Output().
|
protected |
Definition at line 156 of file beam.h.
Referenced by AfterConvergence(), ViscoElasticBeam::AfterConvergence(), AfterPredict(), ViscoElasticBeam::AfterPredict(), AssStiffnessVec(), ViscoElasticBeam::AssStiffnessVec(), Beam(), DsDxi(), ViscoElasticBeam::Init(), Restart_(), SetValue(), ViscoElasticBeam::SetValue(), and ~Beam().
|
protected |
Definition at line 142 of file beam.h.
Referenced by AfterPredict(), ViscoElasticBeam::AfterPredict(), PiezoActuatorBeam::AssJac(), PiezoActuatorVEBeam::AssJac(), AssJac(), AssMats(), AssRes(), PiezoActuatorBeam::AssStiffnessMat(), PiezoActuatorVEBeam::AssStiffnessMat(), AssStiffnessMat(), ViscoElasticBeam::AssStiffnessMat(), AssStiffnessVec(), ViscoElasticBeam::AssStiffnessVec(), Beam(), DsDxi(), GetConnectedNodes(), Init(), InitialAssJac(), InitialAssRes(), Omega0(), pGetNode(), and Restart_().
Definition at line 151 of file beam.h.
Referenced by AfterConvergence(), ViscoElasticBeam::AfterConvergence(), AfterPredict(), ViscoElasticBeam::AfterPredict(), PiezoActuatorBeam::AssStiffnessMat(), PiezoActuatorVEBeam::AssStiffnessMat(), AssStiffnessVec(), ViscoElasticBeam::AssStiffnessVec(), Beam(), dGetPrivData(), DsDxi(), Output(), Restart_(), and SetValue().
Definition at line 153 of file beam.h.
Referenced by AfterConvergence(), ViscoElasticBeam::AfterConvergence(), AfterPredict(), ViscoElasticBeam::AfterPredict(), and Beam().
Definition at line 152 of file beam.h.
Referenced by AfterPredict(), ViscoElasticBeam::AfterPredict(), AssStiffnessVec(), ViscoElasticBeam::AssStiffnessVec(), Beam(), ViscoElasticBeam::Init(), SetValue(), and ViscoElasticBeam::SetValue().
 1.8.7
1.8.7 
